Полетный контроллер ArduPilot Mega (APM) 2.8
Обновление разделов от: 2018-11-01 19-27
Полетный контроллер ArduPilot Mega является полноценным решением БПЛА (Беспилотного Летающего аппарата UAV), который позволяет помимо радиоуправляемого дистанционного пилотирования - автоматическое управление по заранее созданому маршруту, т.е. полет по точкам, а так же обладает возможностью двухсторонней передачей телеметрических данных с борта на наземную станцию (телефон, планшет, ноутбук, DIY) и ведение журнала во встроенную память.
Он основан на автопилоте APM 2.x , разрабатываемым сообществом DIY Drones и базирующийся на open-source проекте, позволяющий превратить любой аппарат в автономное средство и эффективно использовать его не только в развлекательных целях, но и для выполнение профессиональных проектов.
Сравнительная таблица преимуществ автопилота Ardupilot Mega перед DJI NAZA, Wookoong-M, ZeroUAV (YS-X4,YS-X6), Mikrocopter, Hovefly Pro, uThree
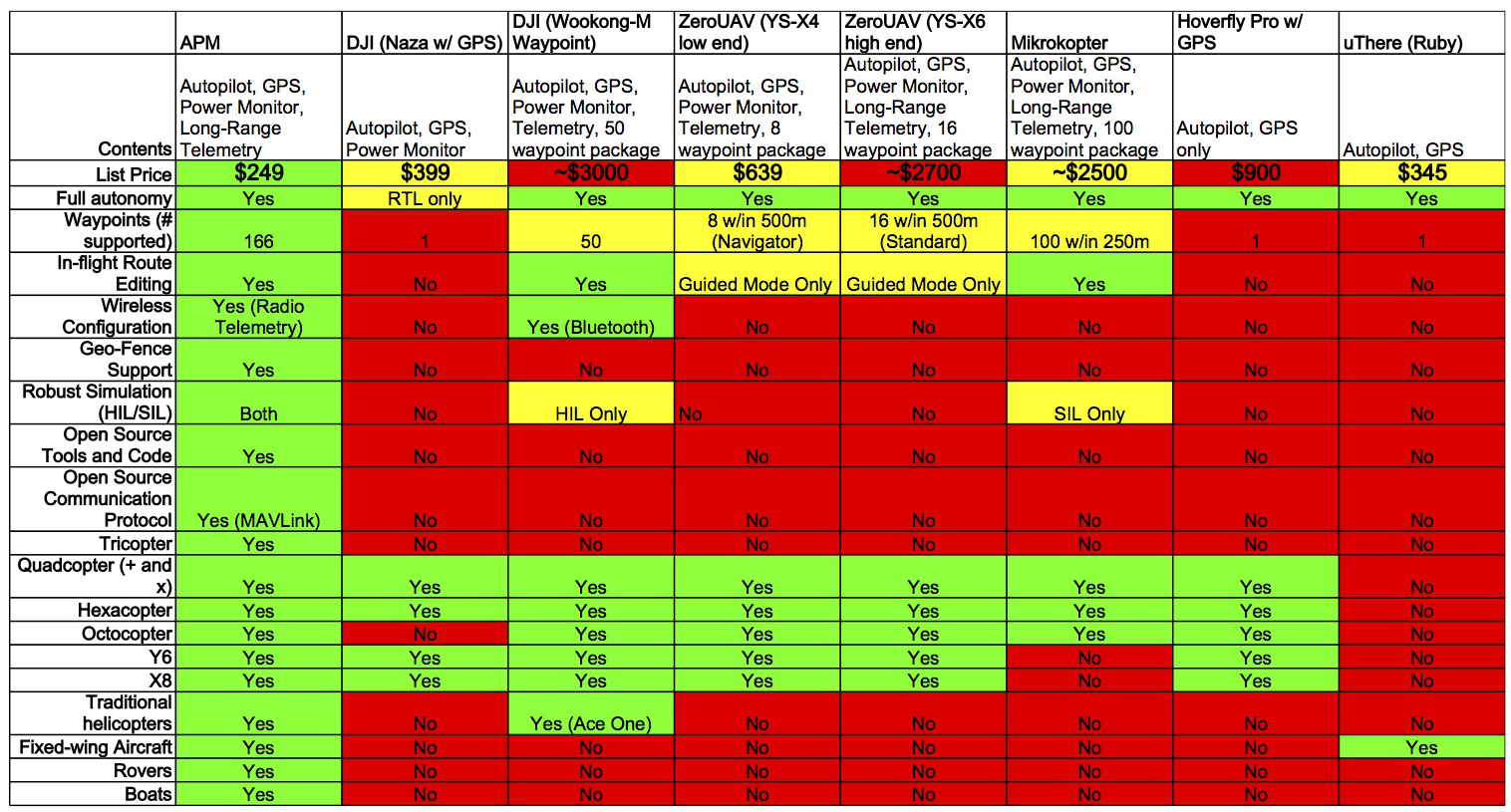
Что мы получаем из коробки:
- Низкую цену
- Полноценный автопилот
- Возможность установить до 166 полетных точек
- Редактирование маршрута в полете
- Беспроводную конфигурацию настроек
- Поддержку Geo-Fence (защита от улёта в виде виртуального забора)
- Открытый исходный код кода и ПО
- Открытый протокол обмена данными
- Поддержка рамы: трикоптера, квадрокоптера (рамы Х, +, H, V), Гексакоптера, Октокоптера, Y6, X8, традиционные вертолеты, самолеты, машинки и лодки
- Поддержка авиасимулятора через ПО Mission Planner
C помощью прошивки может быть установлена на любой радиоуправляемый аппарат:
 квадрокоптеры
квадрокоптеры- классический вертолет
- самолет
- машинку
- лодку
Особенности:
- 3 осевой гироскоп, акселерометр, магнитометр (до 2.5.2) и высокоточный барометр
- Система стабилизации с возможностью воздушной акробатики
- Удержание позиции по GPS, полет по точкам и возврат на точку старта
- Возможность использования инфракрасного датчика для обхода препятствий
- Поддержка ультразвукового датчика (Sonar sensor) для автоматического взлета и посадки
- Автоматическое следование по маршрутным точкам
- Управление двигателями посредством ШИМ (PWM) с использованием дешевых регуляторов скорости (ESC)
- Собственная система стабилизации для камеры (функция контроллера подвеса)
- Радиосвязь и телеметрия с борта
- Поддержка множества рам и конфигураций летающих и ездиющих аппаратов
- Поддержка датчика уровня заряда батареи
- Настраиваемая световая индикация при полетах
- Совместим с многими радиоуправляемыми приемниками PWM и PPM сигналов
- Передача в реальном времени телеметрических данных
- Поддержка OSD телеметрии (наложение на видеопередачу телемерических данных) используя протокол MAVLINK
- Конфигурирования точек полета посредством Google Maps
- Бортовая флеш память 16Мбит для автоматической регистрации данных
- Цифровой компас работает на HMC5883L (до версии 2.5.2)
- 6 степеней свободы в InvenSense акселерометре , гироскоп MPU-6000
- Датчик барометрического давления обновлен до MS5611-01BA03 , от Measurement Specialties
- Контроллер Atmel ATmega2560-16AU и ATMEGA32U-2 чип для обработки и функции USB
- Возможно загрузка обновлений встроенного программного обеспечения и конфигурации
Режимы полетов:
- Стабилизация (Stabilize) - Удержание горизонта
- Удержание высоты (AltHold)
- Loiter - замри и слоняйся
- RTL (Return-to-Launch) - вернутся на точку старта
- Auto - выполнение заданного маршрута в автоматическом режиме
- Acro - акробатика
- Sport - для FPV
- Circle - облет по кругу, радиус задается. включая режим Panorama и ROI
- Drift - полет как у самолета
- Follow Me - следуй за мной, доступно при телеметрии со своей GPS
- Guided - указание пункта назначения, доступно в телеметрии.
- Position - фиксация в воздухе с ручным газом взлета
- Land - автоматическая посадка
- Simple and Super Simple - легкий и суперлегкий полет, подходит для новичков
- Квадрокоптер летает за тобой, как AirDog, Hexo+ и другие экшен версии
- Есть возможность самому создать свой режим полета, для этого необходимы навыки программирования
Скачать последнюю версию Mission Planner
