Режим Acro
Обзор
- Полетный режим Acro позволяет управлять углами наклона и поворотами вокруг своей оси непосредственно с аппаратуры, если стики отпустить то аппарат останется в текущем положении (и не будет стабилизироваться по горизонту)
- Дроссельный газ полностью ручной , управляется пилотом. Скорость двигателей без компенсации угла наклона - поэтому так же прийдется контролировать, что бы сохранить высоту. Если пилот уберет стик газа в минимальное положение то двигатели войдут в режим MOT_SPIN_ARMED и если аппарат в воздухе он потеряет управление начнет падать.
- Полеты в режиме Acro требуют постоянное управление стиками что бы подерживать и контролировать квадрокоптер так же , как и традиционный вертолет без вспомогательных систем. Этот режим позволяет делать маневры и сальто, которые не возможны в других режимах.
- Прошивка ArduCopter 3.1 и выше включает в себя функционал Acro Trainer , который может быть включен или выключен, что бы легче учиться летать в этом режиме.
Предупреждение: Режим Acro наиболее тяжелый для освоения. Вы можете несколько раз приложить аппарат к земле, прежде чем поймете как он работает. Поэтому потренируйтесь заранее на симуляторах вертолёта, что бы понять каково летать без какой-либо помощи контроллера.
Тюнинг параметров режима Acro
- Параметр ACRO_RP_P контролирует коэффициент скорости вращения для крена и тангажа оси (pitch and roll). По умолчанию значение 4.5 - оно будет давать возможность скорости вращения 200градусов в секунду. Более высокие значения приведет к повышению скорости вращения, низкие - к замедлению скорости вращения.
- Параметр ACRO_YAW_P контролирует коэффициент скорости вращения для оси рыскания. По умолчанию значениее 4.5, как и у крена и тангажа, будет давать возможность на 200 градусов в секунду вращения по часовой или против часовой стрелке.
функция тренер Acro
Параметр ACRO_TRAINER может быть установлен на:- 0 = отключено
- 1 = автоматическое выравнивание. Квадрокоптер автоматически стабилизируется по горизонту, когда стики на аппаратуре будут отпущены. Агрессивность с которой он будет возвращается к уровню горизонта можно изменить меняя параметры ACRO_BAL_ROLL и ACRO_BAL_PITCH. По умолчанию значение 1,0 заставляет его вернуться к уровню со скоростью до 30 градусов в секунду. Большие значения сделают это быстрее.
- 2 = автоматическое выравнивание с ограничением угла наклона. Включает в себя автоматическое выравнивание как в предыдущем варианте, но квадрокоптер будет наклонятся не более 45 градусов (этот угол может быть сконфигурирован с параметром ANGLE_MAX).
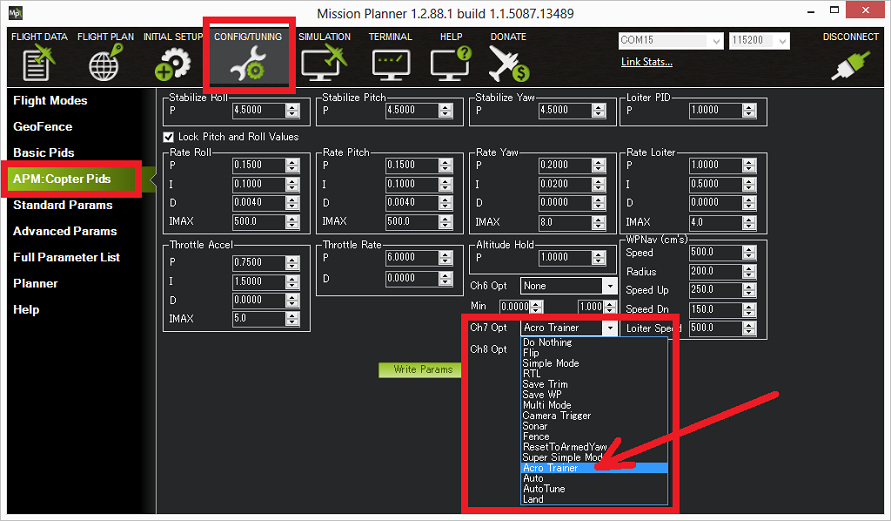
Функцию тренера можно включать с помощью 7 и 8 канала. Используя трехпозиционный переключатель с положением выключения (т.е. PWM/ШИМ меньше 1200) будет отключать эту функцию тренера. Среднее положение переключателя позволит использовать "автоматическое выравнивание) и последнее положение (с PWM/ШИМ больше 1800) позволит включить функцию в режим "автоматическое выравнивание с ограничением". С этой позиции возможны переключения в позицию 0 и 2 (от автора: позиция 1 судя по оригинальной статье не возможна, только возращая на 0 а потом на 1).