Режим стабилизации (Stabilize mode)
Режим стабилизации наиболее часто используется в конфигурации прошивки ArduCopter. Эта страница даст советы и варианты настроек по полетам в этом режиме.
Обзор режима
- Углы наклона контролируются пилотом стиком наклона на аппаратуре. Когда стик наклона крена и тангажа (Roll and Pitch) отпускается происходит автоматическая стабилизация по уровню горизонта
- Пилоту требуется регулярно регуляровать наклонами квадрокоптера, что бы удерживать его на месте под воздействием ветра.
- Пилот управляет рысканьем (Yaw, Rudder) (повоторы по часовой стрелке и против) для изменение положения головы. Когда стик отпускается направление по ходу движения будет поддерживаться на измененом уровне.
- Дроссельной заслонкой (Стик газа, Throttle) пилот регулирует обороты двигателя, требуется постоянная корректировака стиком газа, что бы поддерживать высоту. Если стик газа убрать в минимум , то сработает параметр (MOT_SPIN_ARMED - параметр, определяющий скорость моторов при снятии с охраны - "arming" ) и если апарат находился в полете то он потеряет управление ориентацией и упадет.
- Регулировка газом происходит автоматически на основе угла наклона (т.е. увеличивается как только происходит наклон), что бы уменьшить компенсацию пилот должен следить за высотой квадрокоптера.
- В прошивказ 3.0.1 и более ранних версиях квадрокоптер можно было снять с охраны только в режимах стабилизации и ACRO.
Внимание: Настоятельно рекомендуется освоить полет в режиме стабилизации, чем переходить сразу к другим режимам. Пилот всегда сможет легко и быстро переключиться в режим стабилизации из других режимов полета в случае неожиданного или нежелательного поведения в полете.
Настройка
- Параметр ANGLE_MAX задает максимальй угол наклона, который по умолчанию равен 4500 (т.е. 45 градусов)
- Параметр ANGLE_RATE_MAX задает максимальную запрашиваемую скорость вращения в крена и тангажа, который по умолчанию равен 18000 (180deg/sec).
- Параметр ACRO_YAW_P управляет тем, как быстро аппарат вращается на основе поступающих команд рыскания от пилота. По умолчанию равно 4,5 задаёт скорость 200 град/сек вращения, когда команда стиком удерживается полностью влево или вправо. Большие значения сделают его вращаться быстрее.
- Параметры стабилизации по крену и тангажу (параметр Roll P / Pitch P) реагируют на крен и тангаж которые задает пилот и ошибки между желаемым и фактическими углами крена и тангажа. По умолчанию параметр равен 4,5 будет задавать 4.5 град/сек скорость вращения для каждого одного градуса погрешности в угле.
- Чем выше значение Р тем быстрее аппарат будет наклонятся, чтобы получить нужный угол.
- Высокий P вызывает на аппаратах колебания взад и вперед, как на качелях - несколько раз в секунду.
- Низкий P вызовет медленные движения. Очень низкий P не даст чувтсвовать аппарат и может привести к аварии под влиянием ветра.
- Коэффициенты Roll/Pitch P, I и D - это термины контролирования двигателей на основе требуемой скорости вращения для стабилизации (т.е. угловой стабилизации) контроллером. Эти термины, как правило, связаны с отношением мощности к весу аппарата. более мощные аппараты требуют более низкие значения PID. Например квадрокоптер, который ускоряет очень быстро, возможно, придется установить параметры Roll/Pitch P равным 0,08 в то время как более вялым аппаратам можно использовать 0,18.
- Коэффициент Roll/Pitch P является наиболее важным параметром для настройки вашего квадрокоптера.
- Чем выше P тем сильнее отзывчивость мотора для достижения желаемой скорости поворота.
- По умолчанию Р = 0,15 для стандартного Arducopter (450 класс рамы).
- Коэффициент Roll/Pitch I используется для компенсации внешних сил, которые мешают аппарату поддерживать нужную скорость в течение длительного периода времени.
- Высокий коэффициент I позволит быстро нарастить и быстро снизится до нужного коэффициента, что бы избежать перерегулировки.
- Коэффициент Roll/Pitch D предназначен, что бы ослабить реакцию аппарата к ускорениям в заданых направлениях желаемого положения.
- Высокий параметр D может привести к необычной вибрации и эффекту "памяти", когда чуствительность медленная или вовсе не реагирует.
- Эти значения столь низкие как 0,001 и высокие чем 0,02 - используются в завасимости от аппарата.
Смотрите AC2_attitude_PID для получения более подробной информации по настройке.
Прошивка конфигурации ArduCopter 3.1 и выше включает режим AutoTune , которая позволит вам автоматически определить лучшую стабилизацию и значения PID.
Проверка производительности из флеш памяти полетного контроллера
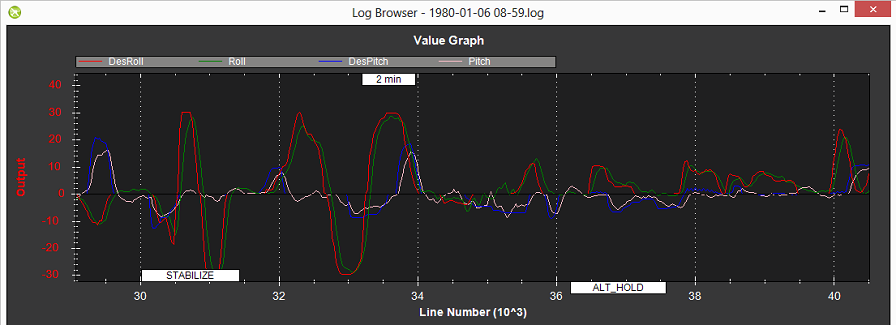
Просмотр режима стабилизации производительности лучше всего сделать, скачав журнал данных с вашего полетного контроллера, затем откройте его с помощью Mission Planner и визуализируйте параметры Roll-In или DesRoll (нужный пилотный угол крена) с Roll (фактический угол) и Pitch-In или DesPitch (требуемы угол тангажа) с Pitch (реальный угол наклона). Эти два совмещенных параметра должны отслеживать хорошо, как показано ниже.
Общие проблемы
- Новый аппарат делает сально сразу же после взлета - это обычно вызванно неправильным подключение двигателя или неправильными пропеллерами (двигатель крутиться по часовой, а пропеллер расчитан на противочасовое движение) проверьте правильность подключения двигателей для вашего APM.
- Аппарат качается по осям крена и тангажа (влева, вправо, назад и вперед для квадрокоптеров) - это обычно означает, что неверные коэффициенты P. смотрите раздел выше о том, как настроить это.
- Аппарат качается при спуске быстро - это вызвано провалами у меняющейся скорости пропеллеров и почти невозможно подстроить, хотя повышая значения коэффициентов Roll/Pitch P может помочь.
- Аппарат крутиться вправо с влево на 15 градусов при взлете - это связано с тем, что двигатели не одинаковые или регуляторы ESC не калиброваны.
- Аппарат стремиться улетать в одном направление даже в безветренную погоду - эту проблему решит триммирование , попробуйте SaveTrim или AutoTrim что бы выровнять его.
- Аппарат не выдерживает высоту или не может оставаться неподвижным в воздухе, как уже упоминалось выше - это ручной режим полета и он требует постоянного контроля стиками на аппаратуре для поддержания высоты и положения.
- Случайные подергивания по крену и тангажу обычно вызваны какими-то помехами в приемнике (например FPV оборудование расположено слишком близко к приемнику) или у регуляторов ESC есть проблема, которая может быть решена путем их калибровки.
- Если аппарат вдруг переворачивается во время полета - это почти всегда связано с механическим повреждением двигателей или регуляторов ESC
