Режим Loiter
В этом режиме квадрокоптер сохраняет постоянное местоположение: курс и высоту. Эти страницы описывают этот режим и дает советы по настройке.
Обзор
При включении режима Loiter квадрокоптер автоматически пытается сохранить текущее местоположение: курс и высоту над уровнем моря. Хорошая позиция GPS, влияние магнитных помех на компас и низкая вибрация являются важными в достижении высоких результатов режима Loiter.
Управление
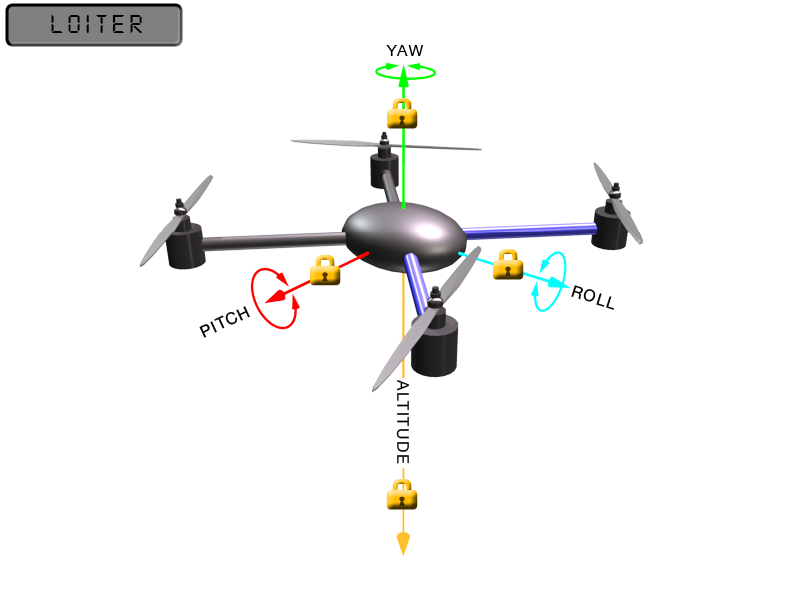
Пилот может контролировать местоположение квадрокоптера в горизонтальном и вертикальном положении через аппаратуру.
- Горизонтальное положение можно регулировать со стика наклона по крену и тангажу (Roll / Pitch) по умоглчанию максимальная горизонтальная скорость 5 метров в секунду. Для того, что бы изменить смотрите раздел Tuning указаный ниже. Когда пилот отпускает стик наклона аппарат останавливается до полной остановки.
- Высоту над уровнем моря можно регуляровать через стик газа дросселя, как и в режиме AltHold.
- Направление (курс) так же можно поменять через стик аппаратуры.
В прошивке ArduCopter 3.1 и выше вы можете снять с охраны (arming) в режиме Loiter, но только когда GPS обнаружил и зафиксировал спутники (3D Fix) и значение HDOP снизился до 2.0 и ниже.
На полетном контроллере светодиод на плате должен гореть постоянно синим светом, когда спутники пойманы в режиме 3D fix.
Величина параметра HDOP хорошо видна через Mission Planer установленного на отображение, через заранее выбраный флажек "gpshdop".

Настройка
Режим Loiter включает в себя режим AltHold. Информация по настройке режима AltHold находятся на соответсвующей странице этого режима.
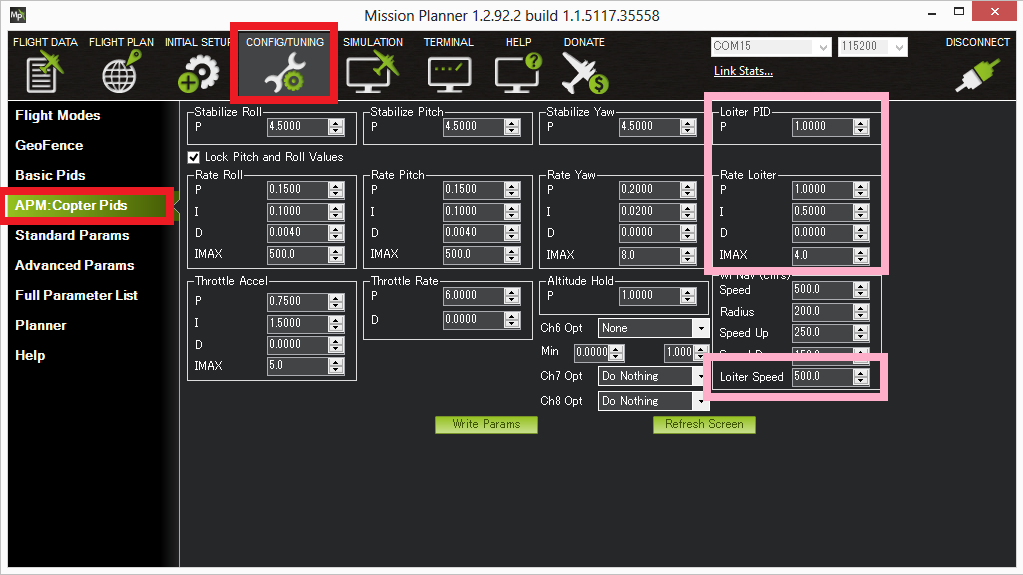
Максимальную горизонтальную скорость полета в режиме Loiter можно регулировать через параметр (WPNAV_LOIT_SPEED) Mission Planeer -> Tuning -> APM ArduCopter PIDS. Значения выражаются в сантиметрах в секунду. 500 единиц равны 5 метров в секунду. Максимальное ускорение в режиме Loiter всегда равно 1\2 от скорости режима Loiter.
Параметр Loiter PID P (в правом верхнем углу на картине выше) используется для конпенсации ошибок горизонтального положения (то есть разница между желаемой и фактической позицией) до желаемой скорости по направлению к целевой позиции. Как правило не требует регулировки. Но с версии 3.х рекомендуется установить в значение 0.2 иначе квадрокоптер будет бешено менять позицию.
Параметры Rate Loiter PID используются для преобразования желаемой скорости к цели до желаемого ускорения. Полученное желаемое ускорение становиться углом наклона, который затем передается в контроллер используя режим стабилизации. Как правило они не требуются в изменении.
Проверка производительности режима Loiter через память журнала полетного контроллера
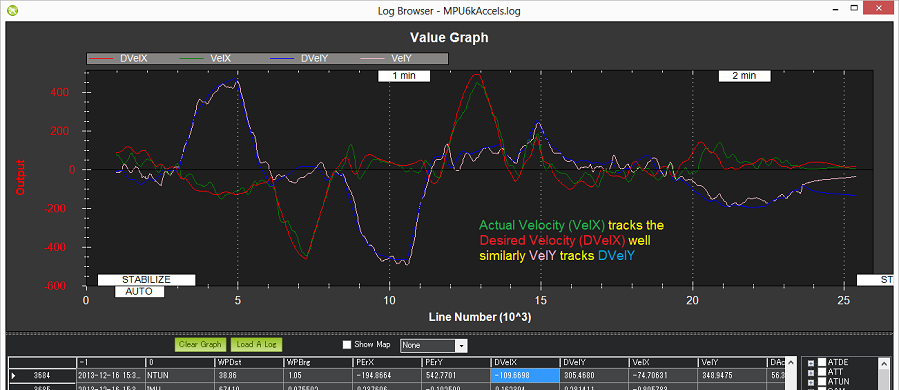
Просмотр производительности режима Loiter лучше всего сделать скачав данные журнала с вашего полетного контроллера. Затем откройте эти данные в Mission Planner и отобразите графики DesVelX в NTUN строке против VelX и DesVelY против Vely. В хорошем квадрокоптере скорости будут отслеживаться желаемые и действительные графики. Координата X - это широта (положительная - перемещение на север, отрицательная на Юг), Координата Y - это долгота (положительная - это восток, отрицательная - запад).
Проверка высоты производительности удержания такая же как и для режима AltHold.
Общие проблемы
Как упоминалось выше - режим Loiter включает в себя контроль по высоте от режима AltHold. Вопросы по режима AltHold рассмотрены на странице этого режима.
- Аппарат может делать круги (туалетит) как показано на видео ниже. Обычно это вызванно проблемой компаса как правло от магнитных помех силовых кабелей под полетным контроллером. Запуск процедуры compassmot или приобретение совмещенного модуля GPS+compass решает эту проблему (но лишний раз провести такую процедуру не помешает для практики и опыта). Другие проблемы могут проявиться из-за неправильной живой калибровке ориентации компаса.
- Аппарат взлетает и двигается в неправильном направлении (уносит) как только переходит в режим Loiter. Причиной может быть так же как и в пункте выше. еще может быть ошибка установки компаса, например больше 90 градусов. Попробуйте выполнить предложенные выше действия указанные выше.
- Квадрокоптер слоняеться как обычно, а потом вдруг взлетает в непрпавильном направлении. Как правило это вызванно ошибкой GPS. Нет 100% защиты от такого - это означает , что пилот всегда должен быть готов взять ручное управление. Обеспечьте хорошее показание HDOP до взлета, так может помочь уменьшение параметров GPSGLITCH_RADIUS и GPSGLITCH_ACCEL (смотрите вики страницу GPSGlitch).
Режим OF_LOITER
Это специальная версия режима LOITER которая будет использовать оптический датчик для поддержания позиции. Она еще не реализована, но работа продолжается. прежде чем выбрать этот режим убедитесь, что оптический датчик Optical Flow установлен и работает.
