Режим посадки (Land)
Режим посадки (Land) пытается посадить аппарат прямо вниз и имеет следующие особенности:
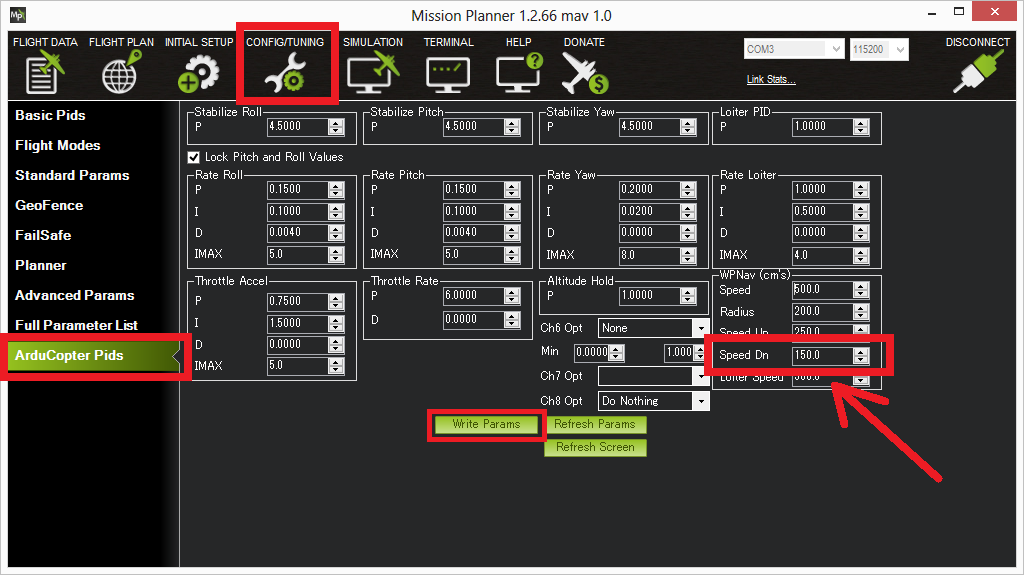
Спускается до 10 метров (или пока датчик Sonar не почувствует землю) c помощью датчика контроля высоты со скоростью , которая указана в параметре WPNAV_SPEED_DN , который может быть изменён в Mission Planner Config/Tuning -> ArduCopter Pids.
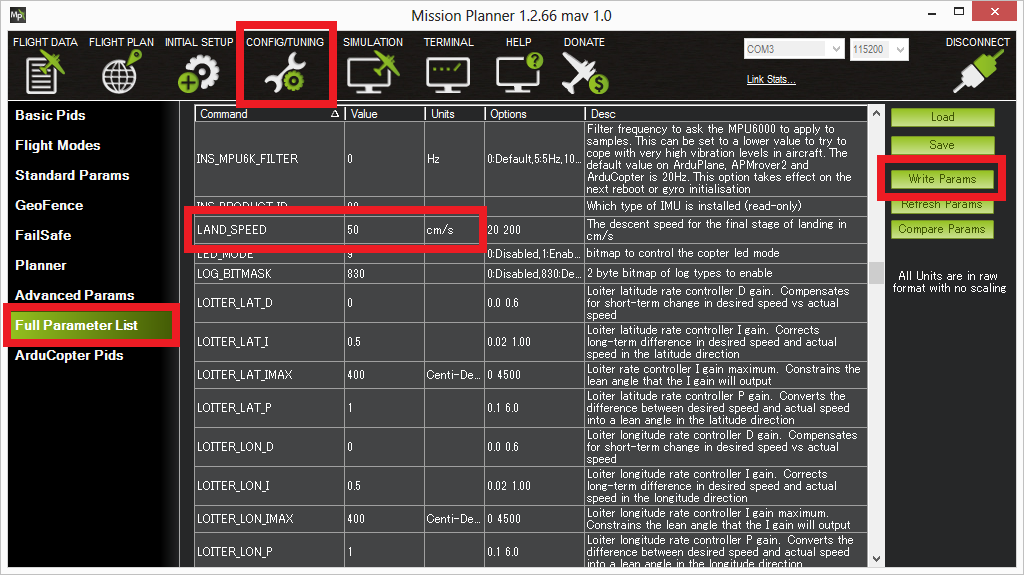
Последние 10 метров квадрокоптер должен спускаться со скоростью указаной в парамете LAND_SPEED который по умолчанию равен 50 сантиметрам в секунду
По достижении земли квадрокоптер автоматически выключит двигатели и поставиться на охрану (disarm) , если дроссель пилота находиться на минимуме.
Примечание: APM квадрокоптеру будет понятно, что он приземлился, если изменение положения остается между показаниями "от -20 до +20" сантиметров в секунду. Он не использует высотомер, что бы принять решение о выключении моторов, но аппарат так же должен быть ниже 10 метров над домашней высотой.
Примечание: APM: вертолет будет понятно, что он приземлился, если двигатели как минимум, но это подняться ставка остается между-20 см / с и 20 см / с в течение одной секунды. Он не использует высоту, чтобы решить, следует ли отключить двигатели исключением того, что вертолет также должна быть ниже 10 м над домашней высоте.- Если квадрокоптер подпрыгивает как воздушный шар на момент посадки на землю - попробуйте уменьшить параметр LAND_SPEED немного.
- Если у аппарата есть фиксация по спутникам GPS - он будет пытаться контролировать горизонтальное положение, но пилот сам может регулировать его как и в режиме Loiter.
- Если у аппарата нет GPS фиксации спутников для удержания горизонтали , то он будет находиться как в режиме стабилизации (Stabilize) и пилот может управлять углами наклона.
- Предупреждение! В любом AltHold режиме, которые основываются на AltHold, Loiter, Auto, AutoLand и RTL если выполнение посадки становиться не устойчивой , когда вы близко находитесь к земле (это видно в подпрыгиваниях или неспособность погасить двигатели должным образом после посадки) вы вероятно имеете проблему в контроллере , который неправильно считывает показания барометра (высотомера) зависящего от давления создаваемого на квадракоптере.
- В этом легко убедиться посмотрев журнал и видя как колеблятся показания высотомера , когда он у земли.
- Если это является проблеммой , то переместите полетный контроллер Ardupilot mega или оградите его соответствующим проветриваемом корпусе с дополнительной утановкой паралона на высотомере.
- Результат можно проверить путем летных испытаний и по результатам бортового журнала.
