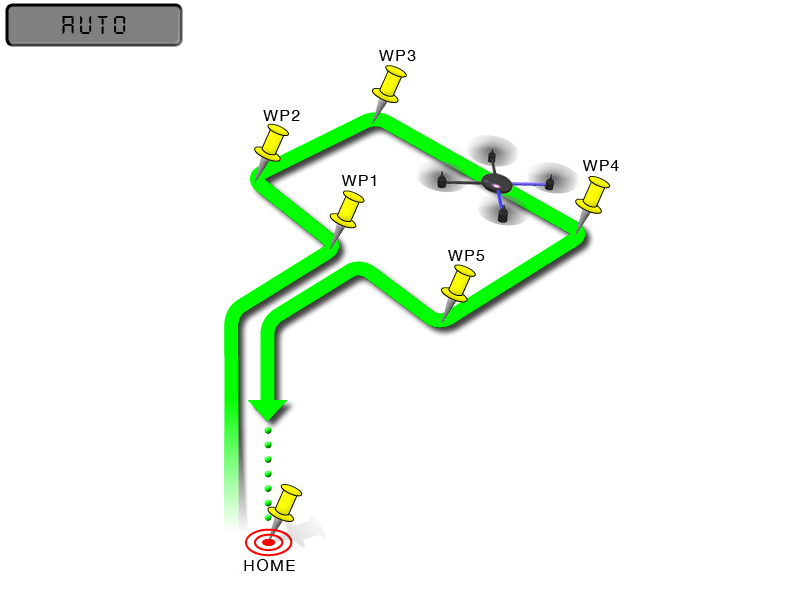
Режим Auto / полет по точкам
В автоматическом режиме квадрокоптер будет следовать по заранее запрограммированном сценарию, хранящемся в памяти автопилота, которая состоит из навигационных команд (то есть точек) и команды "сделать" (т.е. команды, которые не влияют на местоположение квадрокоптера, но вызывают затвор камеры ). Эта страница содержит обзор автоматического режима. Информация о создании сценария миссии можно найти на странице планирование миссии с путевыми точками и событиями.
Обзор
Режим AUTO включает в себя контроль высоты от режима AltHold и управления положением от режима Loiter. Не используйте этот режим если в AltHold и Loiter квадрокоптер не проверялся на полет. Все те же требования необходимы для обеспечении того, что бы полет был стабильным и прогнозируемым: минимальный уровень вибраций и помех компаса являются необходимымы. GPS должен функционировать хорошо в том числе параметр HDOP ниже 2.0.
Управление
АВТО должны быть настроен в качестве одного из режимов полета на переключателе режимов полета.
Если в начале выполнения миссии "полеам по точкам" квадрокоптер находиться на земле пилот должен обеспечить положение стика газа в минимальном положении, а затем перейдя в режим AUTO приподнять стик газа. В тот момент когда стик газа выше нуля - квадрокоптер начинает выполнять миссию полета по точкам.
Началом миссии считается переключение на Auto режим и если квадрокоптер уже взлетел допустим в режиме стабилизации и вы переведете его в режим Auto - команда взлёта уже будет считаться выполненой и он полетит к следующей точке указаной в маршруте.
В любое время пилот может вернуть контроль над автопилотом переключив полетный режим допустим на стабилизацию или Loiter. Если пилот снова включит режим AUTO миссия полетов по точком начнется заново!
В ходе автоматического режима стики газа, наклона игнорируются, кроме стика поворота вокруг оси. Это сделано для того, что бы пилоту можно было повенуть нос у аппарата (на котором, возможно, установленна камера). Автопилот будет пытаться вернуть котроль рысканья (поворота носа) когда пройдет к следующей путевой точке.
Завершение миссии
Миссии, как правило, имеют режим RTL (возращение на точку старта) как окончательную команду, чтобы обеспечить возврат аппарата после завершения миссии полетам по точкам. В качестве альтернативы последняя команда может быть посадкой на землю - режим "Land" в месте последней точки. Без последней команды режимов RTL или LAND аппарат просто остановиться на последней точке в воздухе и пилот должен будет вернуть контроль с аппаратуры.
Помните, что при использовании режима RTL, квадрокоптер вернется в точку "дом", которая устанавливается, когда он был снять с охраны (arming).
Как только квадрокоптер приземлился пилот должен убрать газ до нуля и в этот момент автопилот поставит двигатели на охрану (disarming) если он посчитал, что приземлился :)
Настройка автоматического режима полета по точкам
Режим AUTO включает контроль высоты от режима AltHold и управления положением от режима Loiter .
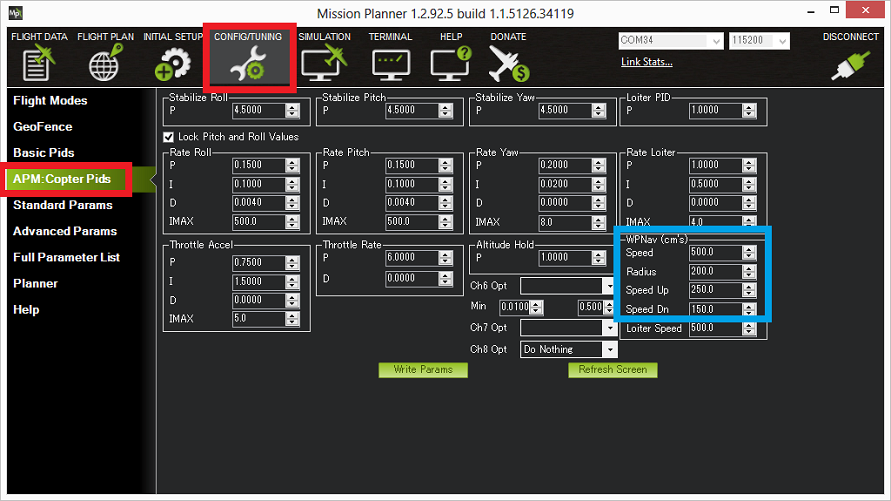
Максимальная горизонтальная скорость вертолета может быть скорректирована параметром (ака WPNAV_SPEED) в Mission Planner Config/Тюнинг >> АРМ: ArduCopter PIDS (см. синее выделение на картинке). По умолчанию используется значение 500 , которое означает скорость в 5 м/с. Типичный квадрокоптер может достигать максимальной скорости от 10 до 13 м/с (то есть 1000 ~ 1300), прежде чем она становится не в состоянии поддерживать высоту и горизонтальную скорость.
Вертикальные скорости вверх и вниз можно отрегулировать с помощью параметра Speed Up (WPNAV_SPEED_UP) и Speed Dn (WPNAV_SPEED_DN) .
Радиус позволяет контролировать, насколько близко аппарат должен прийти к точному положению точки маршрута, после чего маршрутная точка считается выполненой и квадрокоптер летит на следующую точку. Это относится только когда команда "путевая точка" включает в себя задержку в 1 секунду или более. Без промедления путевая точка считается "быстрой путевой точкой" и квадрокоптер начнет лететь к следующей точке.
