Режим "следуй за мной"
Режим "следуй за мной" (Follow Me) делает возможность следовать аппарату за вами , когда вы гуляете - это ваш персональный дройд. (для тех кому нравиться можно назвать его летающими ножницами). Этот режим в конфигурации APM ArduCopter используется функция динамической путевой точки и командным телеметрическим протоколом MAVLink.
Что вам понадобится:
- Квадрокоптер с телеметрией
- Ноутбук (а лучше смартфон, например Android или планшет с OTG разъемом)
Инструкции по использованию
- Установите заранее один из полетных режимов на "Loiter"
- Настройте свой APMCopter на поле и установить соединение по беспроводной телеметрии MAVLink
- Убедитесь, что ваш USB GPS или устройство Bluetooth подключено к ноутбуку и появилось как последовательный порт. Используя программное обеспечение, поставляемое вместе с модулем, убедитесь, что он работает и что у вас есть замок GPS.
- Взлетите и переключитесь в режим Loiter. (Наберите достаточную высоту, что бы гарантировать что он не нападет на вас.).
- В ПО Mission Planner в разделе Flight Data щелкните правой кнопкой мыши на карте и выберите «Fly to Here". Если это работает, вы готовы попробовать режим "следуй за сной".
- В Mission Planner нажмите сочетание клавиш Control-F которая откроет окно и нажмите на кнопку "Follow Me"
После этого появится окно. Выберите последовательный порт, назначенный на свой GPS устройства и все, что скорость передачи данных он использует.
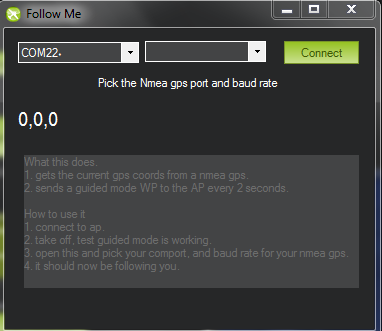
- Как только вы нажмете "Connect" Mission Planner будет читать данные GPS из устройства и отправить его на квадрокоптер как команду "лететь сюда" каждые две секунды.
- Теперь возьмите свой ноутбук и начните ходить.
- Квадрокоптер должен следовать за вами!
- Если вы установили высоту до 15 метров это будет хорошей идеей, чтобы увидеть как он летает за вами.
- Как упоминалось ранее, наберайте достаточную высоту, чтобы избежать травм.
- Серьезно это большая возможность, но безопасность очень важна при использовании режима "следуй за мной" особенно с открытым пропеллерами квадрокоптера.
- Внимание: Как и все другие режимы, в которых автопилот отвечает за удержание высоты (Loiter, AltHold) барометр используется в расчете высоты и аппарат может дрейфовать в течение долгого времени следя за изменением давления воздуха.
