Режим удержания высоты / AltHold mode
В режиме удержания высоты аппарат удерживает постоянную высоту позволяя наклонятся и крутиться вокруг своей оси. Эта страница содержит информацию по настройке режима удержания высоты
Обзор
Если вы выбрали этот режим (AltHold) то система управление газом дроссельной заслонки автоматически поддерживает текущую высоту. Наклоны крена и тангажи , а так же кручения вокруг своей оси (рысканье) как и в режиме сабилизации и означает, что пилот сам управляет этим задавая углы и направление ореинтации.
Автоматическое удержание высоты является особенностью многих других режимов полёта (Loiter, Sport и других) так что эта информация относиться к этим режимам тоже.

Предупреждение: полетный контроллер использует барометр, который измеряет давление в воздухе в качестве основного средства определение высоты (атмосферное давление) и если давление воздуха меняется в вашем районе аппарат будет следить за этими изменениями , а не по фактической высоте ( если вы не в пределах 7 метров над землей и имеете ультразвуковой датчик SONAR который будет включен и следить за этим) . Если вы ниже 8 метров этот датчик (если включен) будет автоматически обеспечивать еще более точное удержание высоты.
Управление
Пилот может контролировать набор высоты или снижение с помощью ручки газа на аппаратуре.
- Если стик газа находиться в середине (40-60 процентов) то аппарат будет поддерживать текущую высоту.
- Если это значение вне этой зоны (меньше 40 или больше 60 процентов) аппарат будет подыматься или опускаться в зависимости от команды газа. Когда газ полностью убран - аппарат опускается на скорости 2.5м/сек и если стик газа максимальный - подыматься на 2.5м/сек. Эти скорости можно отрегулировать с помощью параметра PILOT_VELZ_MAX
Прошивка ArduCopter 3.1 и выше позволяет снимать с охраны (arming) в режиме удержания высоты. При постановки на охрану квадрокоптеру потребуется некоторое время, что бы отдохнуть в посадочном положении несколько секунд, что бы произвести внутреннюю калибровку, показывая ему, что вы приземлились, после этого вы сможете его поставить на охрану (disarm)
Настройка
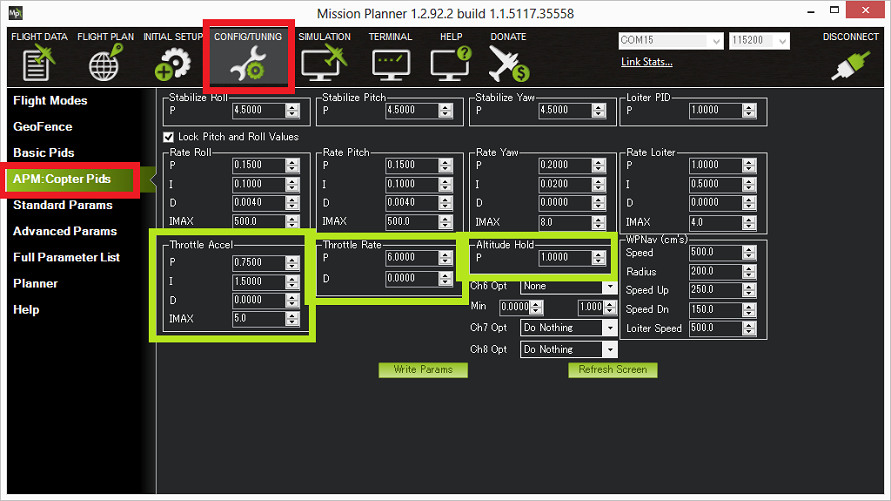
Параметр Altitude Hold P используется для корректировки ошибок показаний высоты (разница между заданой и фактической высотой) до желаемой или скорости снижения. Более высое значение делает его агрессивным пытающегося поддерживать эту высоту, что приводит к резким рывкам дроссельной заслонки.
Параметр Throttle Rate (обычно не требующий настройки) устанавливает коэффициент для набора или снижения на нужном ускорении вверх или вниз.
Параметры Throttle Accel PID корректируют ошибки ускорений (т.е. разницу между желаемыми и фактическими ускорениями) на выходе двигаеля. Отношение 1:2 Accel P к Accel I (тоесть P в два раза превышает значение I) сдедует соблюдать при стандартных парамерах настройки. Для очень мощных аппаратов можно получить лучшую отзывчивость за счет снижения этого соотношения на 50% (тоесть P до 0.5, I до 1.0)
Красивая схема логики работы полетного контроллераПроверка производительности удержания высоты с журнальной флеш памяти полетного контроллера
Просмотр производительности удержания высоты лучше всего сделать скачав журнал с флеш памяти полетного контроллера, затем открыть его в Mission Planner и отобразить график BarAlt (барометр высоты) СTUN сообщений и WPalt (целевая высота) и данные с GPS - RelAlt (инерционная военно-морская высота над уровнем моря, как ни странно включает данные GPS). Эти три параметра должны хорошо отслеживаться, как указано на картинке ниже.

Общие проблемы
Сильные вибрации могут привести к набору (подъему) высоты аппарата, как только будет включен этот режим. Изучите раздел по измерению и поглощению вибрации о том , как измерить и уменьшить вибрацию.
Квадрокоптер медленно спускается и взлетает , когда пилот в режиме стабилизации. Обычно это вызвано тем, что не установлен "средний газ" и происходит когда пилот переходит в режим AltHold от ручного режима полета (такого как Stabilize), который не держиться (не висит) на "среднем газе". Изучите раздел посвященный настройке "положение среднего газа дроссельной заслонки" на аппарате.
Двигатели на мгновение останавливаются, как только включается режим AltHold и аппарат набирает высоту - это обычно происходит когда пилот входит в этот режим в полете, нужная высота устанавливается в момент переключения на этот режим, аппарат начинает взлетать выше цели. Агрессивное установление высоты заставляет полетный контроллер на мгновение останавливает двигатели почти до минимума пока аппарат не начнет падать, что бы установить значение с высотомера. Избежать этого можно путем стабильного удержания высоты перед переключением в этот режим.
Изменения давления воздуха заставляют квадрокоптер дрейфовать вверх или вниз на пару метров в длительном периоде времени и для высоты параметр GCS точность составляет пару метров включая отрицательную высоту (имеется ввиду высота ниже домашней высоты)
Моментальная потеря высоты 1-2 метра после высокоскоростного горизонтального полета вызвана аэродинамическим эффектом, который приводит к моментальному низкому давлению на верхней части аппарата, когда полетный контроллер полагает, что он подымается. Нет никакого решения для этого поведения, хотя увеличение параметра INAV_TC_Z до 7 (по умолчанию 5) уменьшит эффект который указан в самом начале.
Удержание высоты становиться неустойчивым, когда аппарат находится близко к земле или в момент посадки - это может быть вызвано тем, что под влиянием завихрения воздушного потока пропеллерами при посадке барометр не правильно вычисляет высоту. Решением будет изоляция полетного контроллера в какой-нибудь проветриваемый корпус, который уменьшит влияние.
Внезапные изменения высоты вызваные попаданием света на барометр. После середины 2013 года оригинальные платы APM поставляются с черной лентой против этого эфекта.
Элементы питания
Очень важно что бы квадрокоптер имел достаточную мощность. режим AltHold требует больше энергии.
В идеале аппарат должен висеть с 50% дросселя газа и не больше. 70% - это опасно.
Внимание: Если вы используете экспоненты (кривые) на аппаратуре это может привести к нечуствительности газа при удержании высоты.

{kind=link}