Режим RTL
При запуске режима Return to Launch квадрокоптер возращается и зависает над домашней позицией. Можно управлять поведением в режиме RTL. Эта страница описывает как использовать и настраивать режим RTL (возврат домой).
Обзор
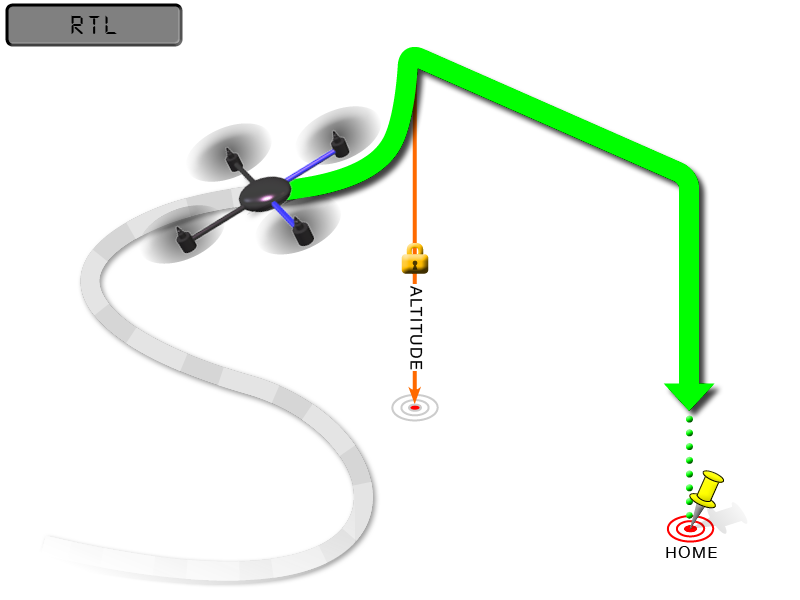
При выборе режима RTL квадрокоптер вернётся в исходное домашнее положение. Сначало он поднимится на высоту указанную в параметре RTL_ALT прежде чем начнет движение в сторону дома (или будет поддерживать текущую высоту, если она превышает указаный параметр RTL_ALT). По умолчанию это значение 15 метров.
Режим RTL зависим от GPS , поэтому важно, что фиксация спутников установлена (3D Fix) прежде чем пытаться использовать этот режим. Перед снятием с охраны (arming) убедитесь, что синий светодиод полетного контроллера ardupilot mega apm вашего квадрокоптера горит постоянно синим и не мигает.
Режим RTL будет командовать квадрокоптеру вернуться в исходное положение и это означает , что он вернётся на место где был снят с охраны (arming). Таким образом исходное положение (home position) всегда должно быть фактическим положением GPS при взлете вашего аппарата. Для конфигурации контроллера ArduCopter если вы зафиксировали спутники GPS (3D Fix) а затем сняли с охраны свой квадрокоптер - исходное положение установиться там, где он был вооружен. Это означает, что если вы перейдете в режим RTL - квадрокоптер вернется на место, где был снят с охраны (arming)
Предупреждение: В режиме RTL полетный контроллер использует барометр, который измеряет давление воздуха в качестве основого средства для определения высоты и если давление воздуха в вашем районе полета меняется - аппарат будет следить за изменениями и не будет поддерживать высоту. Если у вас установлени датчик SONAR и вы не выше 15 метров - это может помочь.
Опции (Параметры, изменяемые пользователем)
RTL_ALT: минимальная высота квадрокоптера, который подымиться, перед возвращением домой.
- Задавая нолевое значение он будет возращаться на текущей высоте.
- Высоту можно установить в пределах от 1 до 8000 сантиметров.
- По умолчанию высота возращения составляет 15 метров (RTL_ALT = 1500)
RTL_ALT_FINAL: Высота квадрокоптера, который будет двигаться на заключительном этапе RTL или после завершения миссии полета по точкам.
- Установите в ноль, чтобы автоматически посадить квадрокоптер.
- Окончательная высота возращения домой может регулироваться от 0 до 1000 сантиметров.
RTL_LOIT_TIME: Время в миллисекундах режима Loiter над домашней позицией перед окончательным спуском на землю.
- Время для "замри и слоняйся" может быть в диапазоне от 0 до 60000 миллисекунд.
WP_YAW_BEHAVIOR: Устанавливает, как автопилот управляет (носом) "Yaw" во время миссий и режима RTL.
- 0 = Никогда не меняет направление носа (Yaw).
- 1 = Лицом к следующей точки или для режима RTL лицо в сторону домашней точки (Home).
- 2 = Лицом к следующей точки или для режима RTL лицом от домашней точки (Home).
LAND_SPEED: Скорость спуска для заключительного этапа посадки в сантиметрах в секунду.
- Посадочная скорость регулируется от 20 до 200 сантиметров в секунду.
Примечания
Другие настройки навигации также имеют влияние на режим RTL:
- WPNAV_ACCEL
- WPNAV_LOITER_SPEED
- WPNAV_SPEED_DN
- WPNAV_SPEED_UP
- Для использования RTL, блокировка GPS должно быть достигнуто (синий GPS светодиод и синий APM светодиод на твердой не мигает), прежде чем вооружать и взлет установить дома или запуска положение.
- Примечание на модуле UBLOX GPS светодиод не горит, пока acguiring спутники и на мигать, когда спутники были приобретены.
- Посадка и повторно вооружении вертолет сбросит дом, который это отличная возможность для полета на аэродромах.
- Если вы получаете заблокировать впервые во время полета, ваш дом будет установлен на месте замка.
- Если вы установите ALT_HOLD_RTL к ряду на отличное от 0 он будет идти и поддерживать эту высоту при возвращении.
- RTL использует waypoint_speed чтобы определить, как быстро он едет.
- После того, как вертолет прибыл на местоположение дома вертолет перейдет в режим слоняться, тайм-аут (AUTO_LAND), то земли.
- Для предотвращения автоматического посадку, просто изменить режимы с управляющего переключателя, чтобы очистить таймер посадки и возобновления нормального полета.
- Ручка газа контролирует высоту при возвращении или слонялся выше дома и не двигатели напрямую.
