Режим полета на точку / Guided mode
Режим направления на точку дает возможность APM конфигурации ArduCopter динамически направлять квадрокоптер в указанную точку без проводов с помощью радиомодулей телеметрии с наземной станции (с ноутбука). Эта страница содержит инструкции по использования режима полета на указанную точку.
Обзор
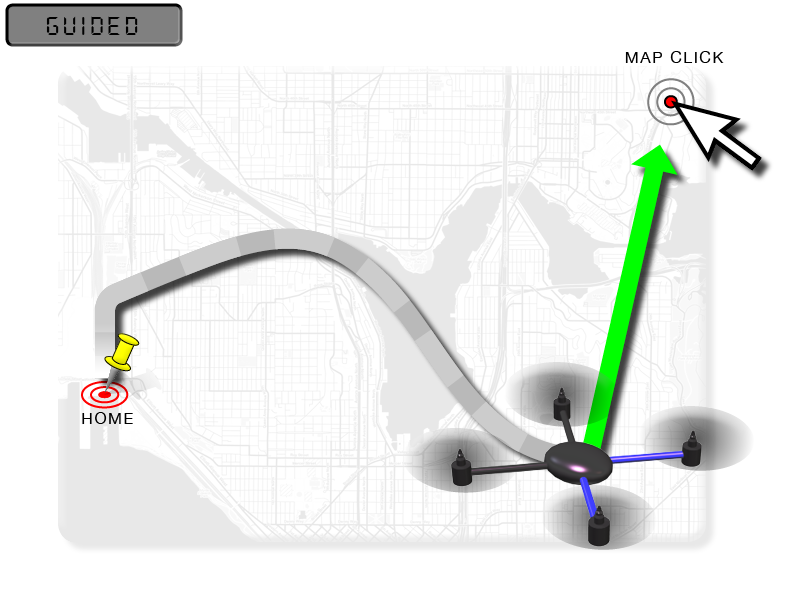
Режим "полет на указанную точку" не является традиционным режимом полета, который назначается через аппаратуру, как в других режимах. Этот режим доступен в приложении наземной станции (например ПО Mission Planner) и телеметрии, позволяя в интерактивном режиме давать команды квадрокоптеру для полета на указанную точку, нажав на карте в Mission Planner. После того, как точка будет достигнута квадрокоптер зависнет в этом месте ожидая следующей цели. Режим Follow Me так же использует режим "полет на указанную точку" , что бы квадрокоптер следовал за пилотом.
Что вам потребуется
Для использования этого режима вам потребуется радиомодули телеметрии (обычно это 915 или 433мгц) которые позволят компьютеру общаться с автопилотом ArduPilot Mega APM во время полета. Это может быть ноутбук с ПО Mission Planner , планшет или телефон c DroidPlanner.
Инструкции
- Установите квадрокоптер на поле и установите соединение MAVLinr по беспроводной телеметрии между квадрокоптером и вашим ноутбуком.
- На ноутбуке используя ПО Mission Planner убедитесь, что пойманые спутники зафиксированы и установлен замок GPS 3DFix.
- Снимите с охраны (arming) и взлетите в режиме Stabilize, далее переключитесь в режим Loiter.
- На экране карты Mission Planner щелкните правой кнопкой мыши и в контекстром меню выберите "Fly to Here"
- Вам будет предложена высота полета в этом режиме, укажите её и нажмите OK
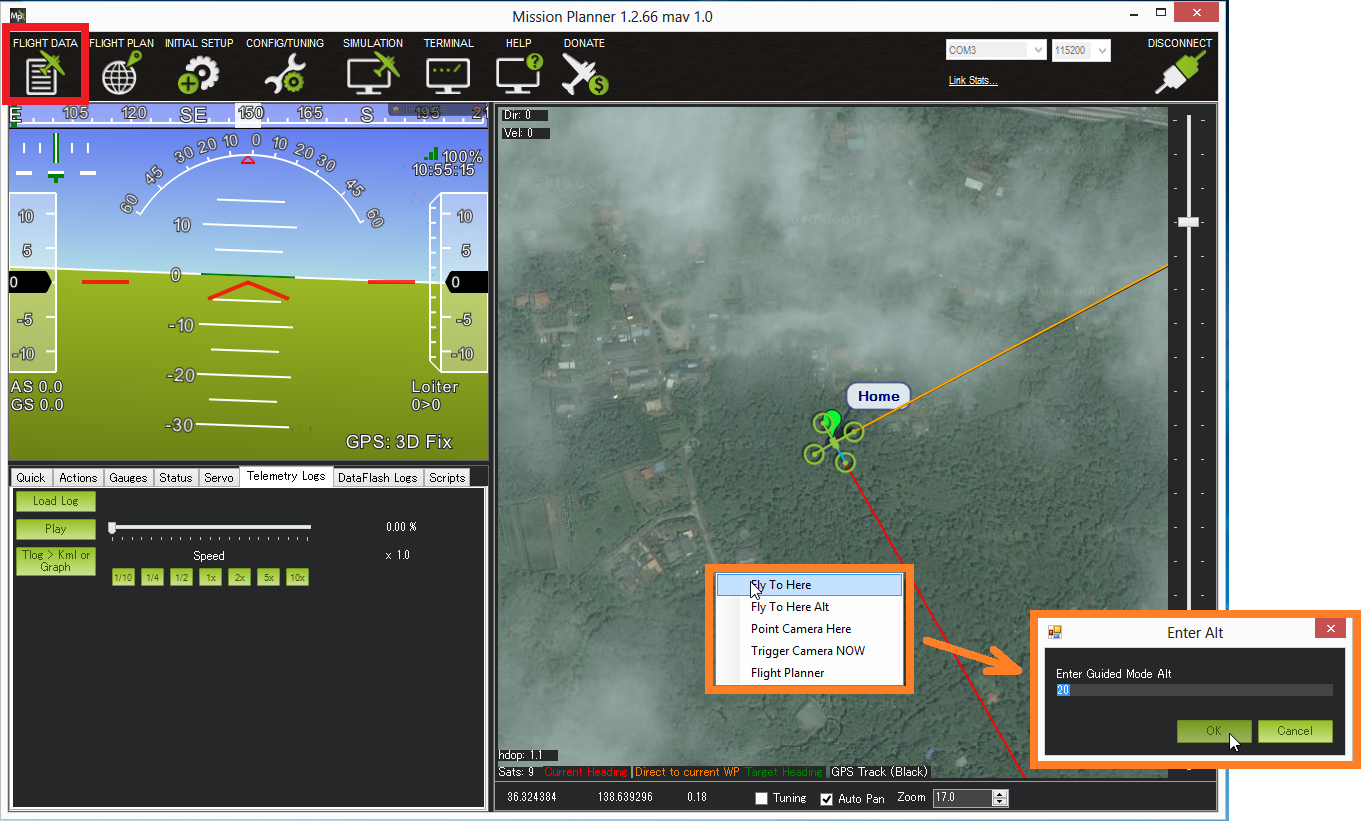
Установленная "точка" появиться на карте и оранжевая линия (которая указывает нос аппарата) должна указывать на эту цель.

Квадрокоптер должен лететь в указаную цель и ждать там, пока вы не укажете другую или не переключитесь в другой режим.
Примечание: Нет необходимости создавать один из ваших режимов полета, как "полет на указанную точку" (guided)
