Настройка PID's
Обзор
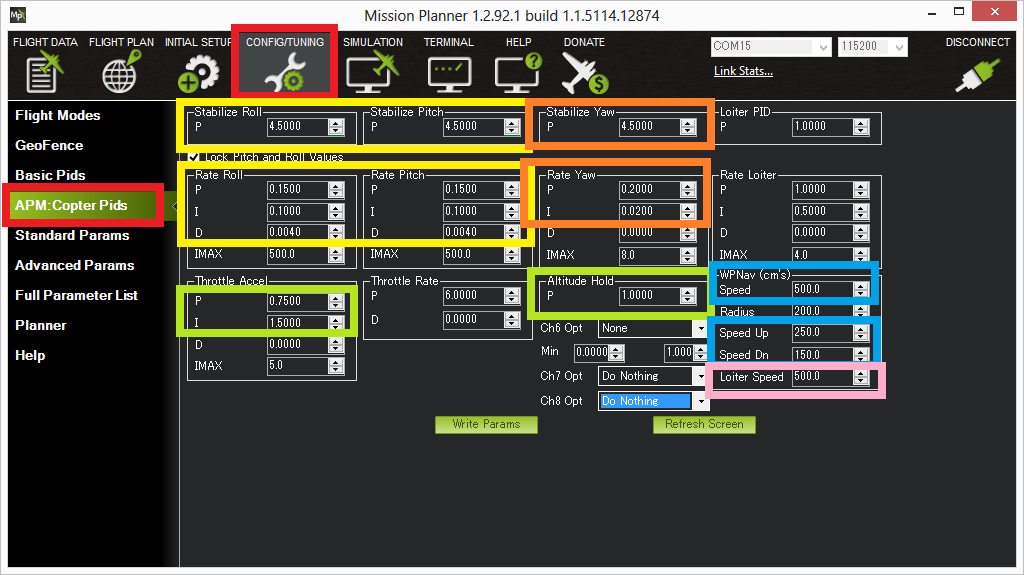
По умолчанию PID усиления предназначены для квадрокоптеров 3DR , хотя они работают на самых разных рамах. Тем не менее, что бы получить оптимальную производительность может потребоваться их настройка , которая может быть сделана через Mission Planner -> Config/Tunung -> APM:Coppter Pids. На картинке выше показаны наиболее важные параметры крена и тангажа (желый квадрат), рысканья (оранжевый) , удержания высоты (зеленый), слоняться (розовый) и путевых точек (синий).
Наиболее важным параметрами являются правые - Rate Roll P (и по умолчанию Rate Pitch P заблокирован с тем же значением). как обсуждалось здесь
Обычно лучше всего начинать с настройки коэффициента Roll/Pitch P в режиме стабилизиции, затем перейти на настройки удержания высоты в режиме AltHold , затем Loiter (который часто не нуждается в настройке) и последнее - настройки производительности полета по навигационным точкам в режиме Auto.
Примечание: Руководство полезной информации с прошивкой ArduCopter версии 2.8.1 настройки этих параметров после версии 2.8.1 очень сильно изменились.
Настройка Roll/Pitch
Параметры Stabilize Roll/Pitch и Rate Roll/Pitch выделеные желтым цветом на снимке управляют отзывчивостью крена и тангажа.
Параметр Rate преобразует желаемую скорость вращения в соответствии с мощностью двигателя является наиболее важным. Наибольшая информация о настройке их находиться здесь здесь
Параметр Stabilize Roll/Pitch P преобразует нужный угол в требуемую скорость вращения, которая меняется контролем скорости.
- Чем выше это значение, тем сильнее квадрокоптер реагирует на наклоны по крену и тангажу, более низкое - сделает реагирование более гладким
- Если установлено слишком большое значение - квадрокоптер будет колебаться по осям крена и тангажа (roll / pitch)
- Если установлено слишком малое значение - квадрокотпер будет вялым на входящие команды
Более подробная информация по настройке крена и такгажа можно найти в разделе Stabilize Roll/Pitch настройки
Объективный взгляд на общий Roll и Pitch производительность можно увидеть посмотрев график из логов полетного контроллера в ATT сообщениях. сопоставив значения на графике Roll-In vs Roll и Pitch-In vs Pitch . Оба графика должны следовать друг за другом в режиме Stabilize и в режиме AltHold.
Как альтернативу вы можете попробовать использовать автонастройку Stabilize и Rate c с помощью AutoTune
Настройка Yaw (рысканье)
Параметры Stabilize Yaw и Rate Yaw выделены на скриншоте выше оранжевым цветом и отвечают за отклик рысканья (поворот носом). Редко, когда эти параметры требуют настройки.
Подобно крену и тангажу, если параметры Stabilize Yaw P или Rate Yaw P слишком высокие - нос квадрокоптера будет колебаться, а если он слишком низкий - квадрокоптер будет не в состоянии поддерживать направление носа.
Как уже упоминалось в разделе режима Stabilize , параметр ACTO_YAW_P отвечает как быстро вертолет будет вращаться на основе команд рысканья пилотом. По умолчани это 4.5 - то есть скорость вращения 200 градусов в секунду, когда стик рысканья полностью утоплен влево или вправо. Большее значение сделают вращения быстрее.
Настройка высоты
Параметры связанные с удержанием высоты выделены зеленым цветом на скриншоте выше.
Параметр Altitude Hold P используется для конвертирования ошибок высоты (разница между заданной и фактической высотой) до набора или снижения желаемой высоты. Чем выше этот коэффициет тем более агресивно пытается поддерживаться эта высота, если слишком большой коэффициет - это приводит к рывкам дросельной заслонки.
Параметр Throttle Rate (который обычно не требует настройки) преобразует коэффициент подъема или спуска до нужного ускорения вверх или вниз.
Параметры Throttle Accel PID добавляют преобразованые ошибки ускорения (то есть разница между желаемым и фактическим ускорением) на выходе у моторов. Придерживайтесь соотношению 1 к 2 (P к I) (т.е. I в два раза выше P) , если вы меняете эти параметры. Эти значения не нужно увеличивать , но для очень мошных квадрокоптеров вы можете получить хорошую отзывчивость за счет снижения соотношения этих двух параметров до 50% (то есть P = 0.5 , а I=1.0).
Смотрите страницу режима удержания высоты (AltHold) для получения дополнительной информации.
Настройка Loiter
Если крен и тангаж (наклоны по сторонам квадрокоптера) настроены правильно, GPS и Компас настроенны правильно и уровень вибрации приемлемый, то настройка Loiter не требуется, но пожалйста посетите страницу полетного режима Loiter для дополнительной информации по настройкам включая горизонтальную скорость.
Настройка в полете
Одиночный параметр может быть настроен в полете с помощью 6-го канала на аппаратуре. Для примера можно настроить Rate Roll/Pitch P значния , найденые на странице Настройка Rate Roll/Pitch P раздела "настройка в полете". Пожалуйста посмотрите в ПО Mission Planner в разделе Config/Tuning -> APM Copter PIDS полный список параметров назначаемых на 6-й канал которые могут быть настроены.
После установки значения на 6-й канал , его показания минимума и максимума должны быть в разумных пределах ( то есть не нулевой , а так же неоправданно большой), а затем нажмите кнопку "Refresh screen" убедитесь, что путем настройки регулятора 6-го канала параметр правильно обновляется.
Видео инструкция по PID's
Русская вики ПИД Регулятор
PID's (Пропорционально-интегрально-дифференциальный) регулирование является методом используемым в нашей прошивки для стабилизации аппарата.
Пропорциональня P = немедленная коррекция: чем дальше от нас (значения), тем больше делается коррекция
Интегральная I = сверхурочная или постоянная коррекция: если мы не в состоянии добиться результата дополнительной коррекции.
Дифференциальная D = Легкая коррекция: коррекция быстрая? замедлим её (ослабим) немного, что бы избежать перерегулировки.
