AutoTune
Обзор
Функция AutoTune доступна в конфигурации ArduCopter прошивки 3.1-rc5 и выше. Она пытается подстроить стабилизиционный P и коэффициенты P и D , которые обеспечивают высокую реакцию без перегрузки. Настройка делается путем подергивания квадрокоптера по крену и тангажу, которая требует настроеный и хорошо летаемый аппарат в режиме AltHold , прежде чем пытаться использовать AutoTune.
Как вызывать AutoTune
1. Настройке один из режимов полета на переключателе , что бы он был AltHold.
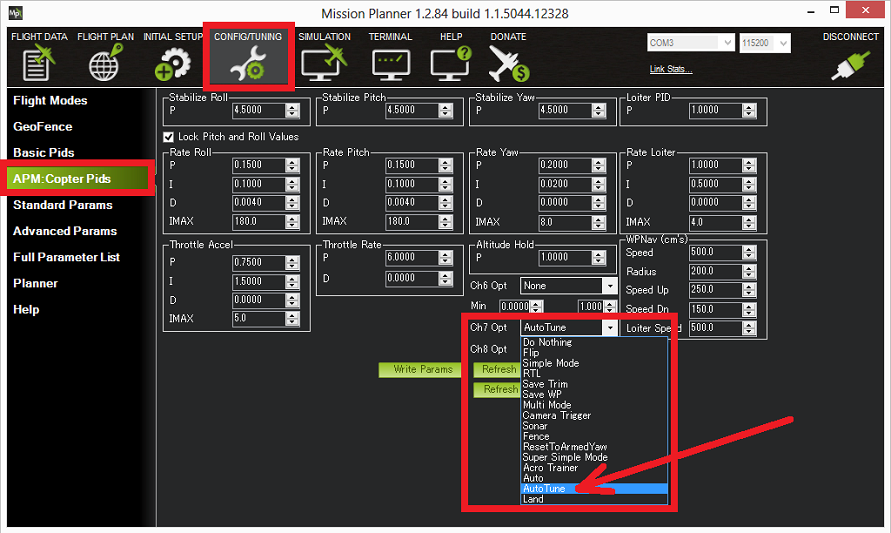
2. Установите один из допольнительных каналов (7 или 8) на функцию AutoTune в ПО Mission Planner.
3. Убедитесь что назначений переключатель находиться в нижнем положении.
4. Дождитесь спокойный и безветренный день и идите на большую открытую площадку.
5. Взлетите и перейдите в режим AltHold на удобной высоте.
6. Установите назначеный переключатель в верхнее положение для включения атоматической настройки AutoTune:
- Сначала вы увидете , как квадрокоптер будет дергаться влево и вправо на 20 градусов несколько минут затем он повторит такие наклоны вперед и назад.
- Используйте стики наклона по крену и тангажу в любое время, что бы изменить положение квадрокоптера , если он дрейфует в сторону (он будет использовать оригинальные PID настройки во время перепозиционированием и между тестами AutoTune). Когда вы отпустите стики наклона - он будет продолжать автоматическую настройку AutoTune , где она была прервана.
- Переведите переключатель заранее назначенного канала в нижнее положение в любое время, что бы отказаться от автоматической настройки и вернуться к исходным значениям PID.
- Убедитесь, что у вас отсутствуют тримы на аппаратуре иначе автонастройка AutoTune не сможет получить сигнал о том, что стики находятся в центральном положении.
7. Когда квадрокоптер завершит настройку он вернется к оригинальным значениям PID.
8. Установите переключатель канала в нижнее положение , а затем в верхнее, что бы проверить новые настройки PID.
9. Установите переключатель канала в нижнее положение что бы летать с использованием оригинальных значений PID.
10. Если вас все устраивает с автоматической настройкой PID AutoTune , оставте переключатель в верхнем положении, совершие посадку а затем встаньте на охрану (disarm) для сохранения новых настроек PID.
Если вам не нравятся новые настройки PID , установите переключатель в нижнее положение сигнала для возврата к исходным PID. Новые PID не будут сохранены, если вы поставите на охрану (disarm) квадрокоптер.
Примечания:
Предупреждение! AutoTune может запросить очень большие изменения скорости оборотов двигетелей, которые могут вызвать потерю ESC синхронизации, особено при использовании прошивок SimonK и/или низкий KV у моторов (ниже 500kv). Посмотрите на это видео, которое демонтстрирует эту проблему:
- AutoTune иногда не в состоянии найти хорошие настройки для рам с очень мягкими демферами у APM или очень гибкими лучями у рамы.
- Для достижения лучших результатов квадрокоптер не должен быть построен для больших скоростей. Это будет предотвращать применение быстрых корректировок между тестов (подергиваниями).
- Имейте ввиду, что AutoTune будет включать стабилизацию, поэтому случайно не переключайтесь из этого режима автонастройки, пока вы не в режиме AltHold и готовы для начала этой процедуры.
- При возникновения проблем с AutoTune пожалуйста скачивайте логи журнала с вашего полетного контроллера ArduPilot Mega, что бы сообщество могло вам помочь
Данные с бортового журнала логов
ATUN (обзор автонастройки) и ATDE (детали автонастройки) - это те сообщения которые записываются в журнал полетного контроллера. Некоторые поднопбности собержания этих сообщений можн онайти на странице анализа данных журнала
