Бортовой журнал (DataFlash Log)
Типы журнала (Dataflash и telemetry)
Есть два способа записи полетных данных с ArduCopter. За некоторым исключением эти два вида записей очень похожи, но отличаются:
- Журнал DataFlash (описанный на этой странице) можно использовать на плате самого полетного контроллера APM или PX4, которые можно загрузить после полета.
- Журнал телеметрии (так же известный как "tlogs") пишется ПО Mission Planner (или другой наземной станцией) когда вы подключили вашу APM через модемы телеметрии. Здесь можно найти поднобности
Настройте какие данные вы ходите записывать
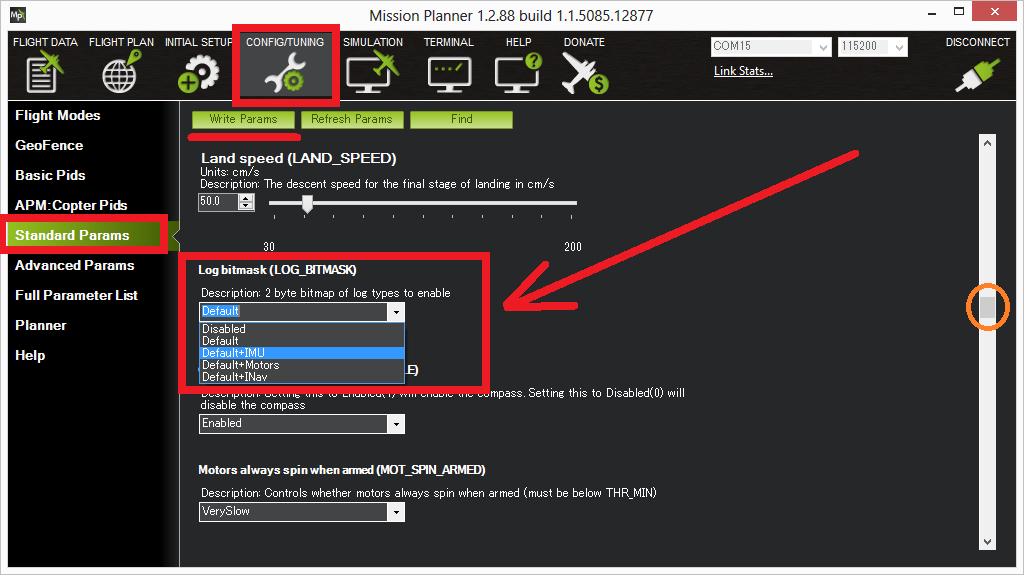
Параметр LOG_BITMASK управляет типами записываемыми сообщениями в бортовую память полетного контроллера. Если вы хотите добавить какой-то конкретный дополнительный тип сообщений в дополнение к значениям по-умолчанию, выберите из выпадающего списка раздела Parametr List ПО Mission Planner.
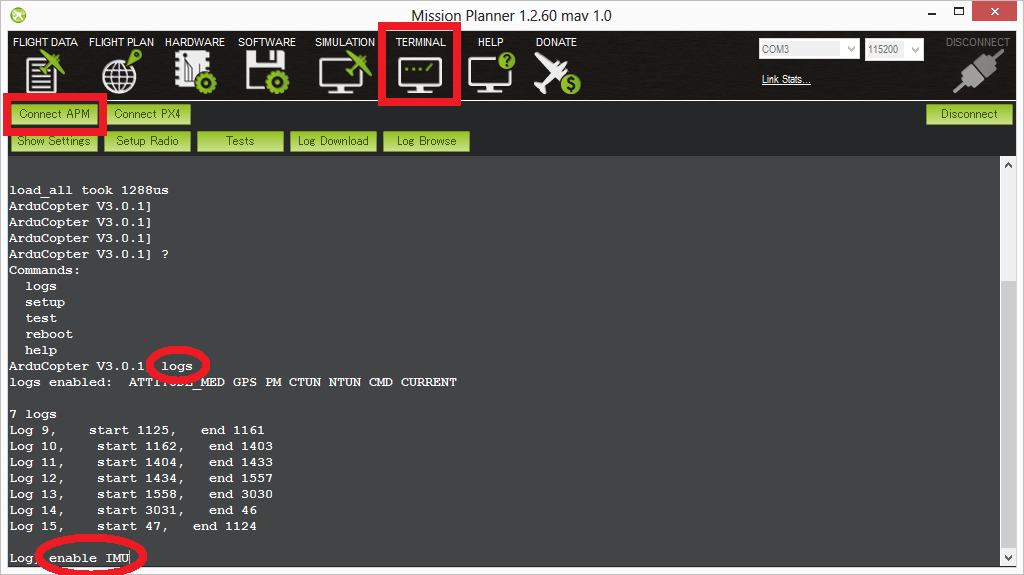
Для лучшего контроля какие именно сообщения записываются можно использовать интерфейс командной строки CLI следующим образом:
- Перейдите в раздел Terminal ПО Mission Planner
- Нажмите кнопку "Connect APM" или "Connect PX"
- Введите слово logs
- Включите или отключите один из возможных типов сообщений набрав enable или disable c последующим типом сообщения, например enable IMU
Полный список возможных данных сообщений для ArduCopter являются:
- ATT: крен, тангаж и рысканье (запись при 50Гц, если включена ATTITUDE_FAST. 10Гц, если включен с ATTITUDE_MED)
- ATUN: обзор autotune (записывается в начале каждого испытания "подергивания")
- ATDE: детали autotune (записывает в 100Гц как квадрокоптер дергается)
- CAMERA: GPS время, наклоны квадрокоптера (по трем осям) , широта, долгода и высота над уровнем моря на данный момент срабатывания затвора камеры
- CMD: команды полученные от наземной станции или запущеные как часть миссии.
- COMPAS: данные значения компаса и значения коррекции compassmot
- CURRENT: напряжение батареи, тока и бортовое питание записывается в 10Гц.
- CTUN: информация о дроссельной заслонке и высоте включая подаваемые пилотом газ, высоту от датчика sonar, барометра. Записывается с частотой 10Гц/с
- DU32: id=9 Инициализция направления носа в режиме Simple в сантиметрах-градусы (т.е. 18000 = ЮГ)
- DU32: id=7 Битовая маска внутреннего состояния. Биты можно найти по этой ссылке
- ERR: Ошибка подсистемы и номер ошибки. Список можно найти на этой странице
- EV: номер события. Полный список возможных событиях можно найти в defines.h, но наиболее распространенными являются:
- 10 = Снят с охраны (Arming)
- 11 = Поставлен на охрану (Disarming)
- 15 = Автоматически снят с охраны (когда пилот подал газ выше нуля и автопилот может свободно взять контроль над дроссельной заслонкой)
- 16 = Посадка
- 18 = Произведенная посадка
- 25 = Установка дома (координаты "домашнего" расположения были захвачены)
- GPS: GPS позиция, высота, количество спутников, HDOP записываются с обновляемыми данными GPS (обычно 5Гц)
- IMU: сырые данные акселерометра и гироскопа, записанные при 50Гц
- INAV: инерциальная навигационная высота и положение
- NTUN: навигационные данные, включая желаемую и фактическую скорости, желаемые ускорения, наклоны и повороты. Записывается при 10Гц в то время как автопилот управляет горизонтальным положением (Loiter, RTL, AUTO)
- OPTFLOW: данные скорости и желаемые углы крена и тангажа оптического датчика потока (optical flow) , если OF_LOITER включен
- PID: результаты выхода P, I и D PID-регулятора, если он в нстоящее время настроен с помощью настройки 6-го канала. Записывает при 50Гц
- PM: данные о производительности включая номер медленного и длительного цикла в мс (записывает один раз в 10сек)
- RCOUT: Индивидуальный уровень ШИМ (PWM) записываются при 50Гц (Моторов)
Пожалуйста обратите внимание, если вы включите слишком много дополнительного логирования журналов - это отобразиться на производительности процессора и качестве полета, поэтому придерживайтесь поочередному включению записи логов.
Если вы ходите увидеть какие элементы вы можете получить для других платформ, сделайте следующие шаги:
- Запишите список включенных элементов , прежде чем делать следующие шаги
- Введите Enable All это позволит регистрировать все параметры для вашей платформы - некоторые из них, возможно, вам не нужны. Вы увидите список всех элементов которые в настоящее время зарегистрированны.
- Что бы удалить элементы в списке которые вы не хотите регистрировать в журнал данных установите им режим disable у каждого из не нужного вам элемента. Или вы можите вернуться в Mission Planner -> Advanced Parametrs и используя BITMASK (LOG_BITMASK) выбрать одну из нужных вам конфигурация вашего аппарата
Загрузка журнала из Mission Planner
- Зайдите в экран TERMINAL ПО Misson Planner
- Нажмите "Connect APM"
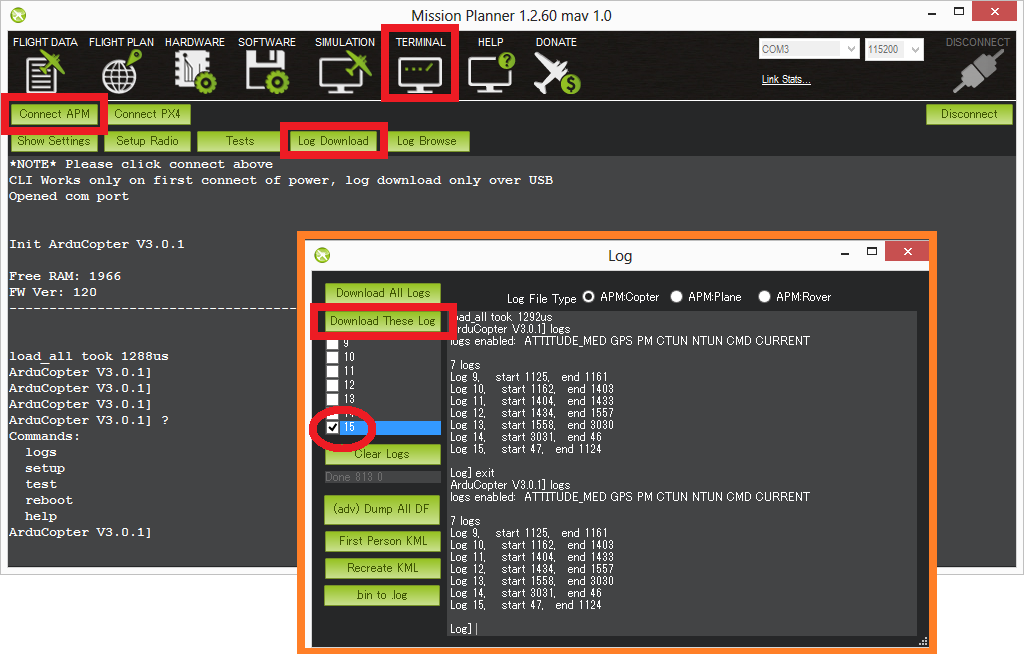
- В открывшемся окне нажмите кнопку "Log Download"
- Когда появится окно "Log" установите флажок журнала который вы хотите скачать (обычно это наибольшее число )
- Выберите тип журнала в зависимости от конфигурации платформы (APM:Copter, APM:Plane, APM:Rover) Это гарантирует, что вы получите правильные данные из памяти.
- Нажмите кнопку "Download There Log"
Для очень больших данных журнала это может занять несколько минут, вы должны увидеть количество данных, передаваемых под кнопкой "Clear Logs". Когда журнал полностью загружен под кнопкой "Clear Logs" появится надпись "Done".
Журнал появится в вашем каталоги ПО Mission Planner (каталог, где был установлен Mission Planner) в пвпку под названием "logs" или по выбранному вами месту в настройках Config/Tunung->Planner. Файл будет иметь формат: YYYY-MM-DD HH-MM ##.log
Рядом с лог-файлом будет файл KMZ который покажет вам 3D вид траектории полета, если открыть в Google Earth. GPX Файл так же производиться , но используется редко.
Очитка журнала:
- Кнопка "Clear Logs" очистит все журналы, если её нажать
- Это хорошая идея, что бы сохранить файлы журналов до дня полета
- Как только внутренняя память будет заполнена она будет перезаписывать старые данные.
Просмотр содержимого
Файлы журналов могут быть открыты для анализа. Выполните следующие действия:
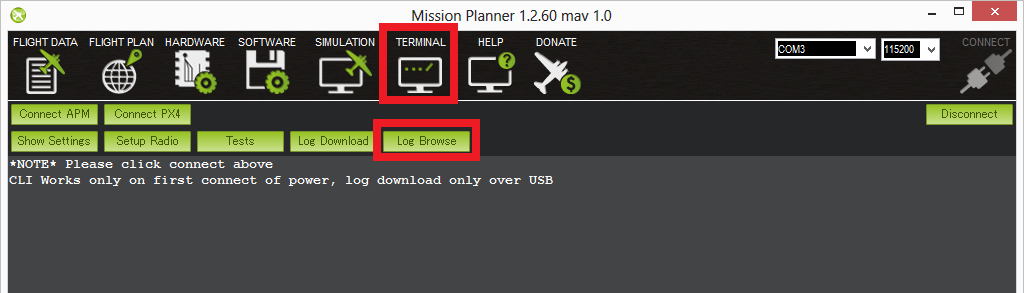
- Откройте экран Terminal ПО Mission Planner
- Нажмите кнопку "Log Browse" и укажите на один из файлов с расширением log
Экран с графиком обозревателя журналов появится перед вами. Размеры графика моугут быть изменены, нажмите и удерживайте мышкой непосредственно под графиком.
Основным форматом журнала являются:
- На левой стороне отображаются номера строки
- Версия ПО и платы отображаются в самом начале (вверху)
- Следующими идут FTM сообщения, показывающие заголовки колонок для каждого типа сообщения
- PARM строки , которык показывают каждый параметр (в том порядке, в котором они появляются в EEPROM) вместе с их первоначальными значениями
- Сообщения полетных данных, включая GPS, IMU и другие

Отображения графика полетных данных осуществляеся нажатием на соответствующую строку, вы должны увидеть заголовки столбцов соответсвующим образом. Далее найдите столбец, который вы хотите построить на графике, нажмите на него, а затем нажмите "Graph this data". В приведенном выше примере отображатся ATT Roll-in и Roll данные.
Покрутите колесиком мышки , что бы увеличить или уменьшить масштаб графика. Вы так же можете выбрать область на графике, что бы увеличить масштаб на нем. Если щелкнуть правой кнопкой мыши и выбырать "Set Scale defaul" то масштаб установиться маштабом по-умолчанию. вот мини руководсво по использованию этого.
Вы так же можете отфильтровать только только по первой колонке (сообщения полета), нажав на первом столбце и выбрав тип сообщения из раскрывшающегося списка. Это очень полезно, особенно для просмотров различных полетных режимов (называемое "MODE" режимом), используемых в ходе миссии. Нажмите на первый столбец снова и выберите "Cancel" что бы сбросить фильтр.

Подробности сообщений (Конкретно для APM ArduCopter)
ATT (информация высоты)
- Rollin: Желааемый угол крена пилота в сантиметро-градусах (наклон в лево - отрицательное, вправо - положительное)
- Roll: фактический наклон квадрокоптера в сантиметро-градусах (наклон влево - отрицательное, вправо - положительное значение)
- Pitchin: желаемый угол наклона пилота в сантиметро-градусах (наклок вперёд - отрицательное, назад - положительное)
- Pitch: фактический угол тангажа квадрокоптера в сантиметро-градусах (вперед отрицательное, назад - положительное)
- YawIn: требуемая скорость рысканья пилота, число от -4500 до +4500 (не градусы/секунды, вращение по часовой - положительное)
- Yaw: фактическое направление носа, в сантиметро-градусы, 0 = север.
- NavYaw: желаемое направление носа в сантиметро-градусов.
ATUN (обзор автонастройки)
- Ось: 0 = Roll , 1 = Pitch
- TuneStep: 0 = Возвращение к уровню (по горизонту) (до или после испытания), 1 = тестирование (т.е. выполнение подергивания, что бы проверить реакцию), 2 = обновление коэффициентов (дерганье завершено и применены коэффициенты)
- RateMin: Минимальный записанный коэффициент во время теста
- RateMax: Максимальный записанный коэффициент во время теста
- RPGain: Коэффициент усиления P происходящего испытания
- RDGain: Коэффициент усиления D происходяего испытания
- SPGain Коэфициент стабилизации P происходяего испытания
ATDE (Auto Tune подробные шаги )
- Angle: угол квадрокоптера в сантиметро-градусах для оси которая проходит испытывается
- Rate: скорость вращения квадрокоптера для оси которая проходит испытания
CAM (время и место, когда затвор камеры был активирован)
- GPSTime: сообщенное время GPS в миллисекундах
- Lat: данные акселерометра + оценка широты GPS
- Lon: данные акселерометра + оценка долготы GPS
- Alt: данные акселерометра + оценка высоты с барометра в сантиметрах над землей
- Roll: угол крена квадрокоптера в сантиметро-градусах
- Pitch: угол наклона квадрокоптера в сантиметро-градусах
- Yaw: курсовое направление в сантиметро-градусах
CMD (команды, полученные от наземной станции или как часть выполняемой миссии)
- CTot: общие число команд в миссии
- CNUM: номер команды в миссии (0 - всегда "дом", 1 - является первой командой миссии и т.д.)
- CId: индификатор сообщений mavlink подробнее
- Copt: дополнительный параметр (используется для различных целей)
- Prm1: параметр команды (используется для различных целей)
- Alt: команды высоты в метрах
- Lat: команды позиции широты
- Lng: команды позиции долготы
COMPASS ("сырые данные" компаса, смещения и значения коррекции compassmot)
- MagX, Magy. Magz: "сырые значения" магнитного поля для х, у и z осей
- OfsX, OfsY, OfsZ: "сырье значения" магнитного смещения (изменятся только тогда, когда параметр COMPASS_LEARN 1)
- MOfsX, MOfsY, MOfsZ: compassmot компенсация дроссельной заслонкой или тока
CURRENT (напряжение батареи, ток бортовое напряжение )
- Thr: подаваемое пилотом газ дроссельной заслонки (от 0 до 1000)
- ThrInt: встроенный дроссель (т.е. сумма общего выхода дроссельной заслонки для этого полета)
- Volt: напряжение батареи в вольтах * 100
- Curr: ток от батареи в амперах * 100
- Vcc: напряжение на плате
- CurrTot: общий ток, протекающий от батареи
CTUN (информация дросельной заслонки и высоты)
- ThrIn: дроссель пилота в виде числа от 0 до 1000
- SonAlt: высота над землей в соответствии с гидролокатором
- BarAlt: высота над землей в соответствии с барометром
- WPAlt: желаемая высота в то время когда полетный режим AltHold, Loiter, RTL, AUTO
- NavThr: не используется
- AngBst: дроссельной увеличение (от 0 ~ 1000), как результат обучениям полета квадрокоптера (автоматически добавляется ко всем пилотным и автопилотным дросселям, чтобы уменьшить потерю высоты во время обучения)
- CRate: акселерометр + оценка скороподъемности барометра в см/с
- ThrOut: окончательное значение вывода дроссельного газа посланому к двигателям (от 0 до 1000). Обычно равен ThrIn + AngBst в режиме стабилизации.
- DCRate: - пилотируемое желание скороподъемности в см/с
D32, DU32 (отдельные значения данных, которые либо целые 32 битные или целые 32 битные числа без знака):
- ID: идентификационный номер для переменной. Есть только два возможных значения
- 7 = битовая маска из внутреннего состояния. Смысл отдельных битов можно найти в определении ArduCopter.pde 'ы структуры ап.
- 9 = полетный режим simple mode в сантиметро-градусном указании направления курса
ERR (сообщения об ошибке)
Подсистемы и коды ошибок перечислены ниже
- 1: Главная (никогда не используется)
- 2: Radio
- ECODE 1: "Последний кадр", что означает, что PPM кодер АРМ в не получала обновления более 2 секунд
- ECODE 0: ошибка решена, что означает, что PPM кодер начал получать данные снова
- 3: Compass
- ECODE 1: компас не удалось инициализировать (вероятно аппаратная проблема)
- ECODE 2: сбой при попытке прочитать одно значение из компаса (вероятно аппаратная проблема)
- ECODE 0: ошибоки выше решены
- 4: Optical Flow
- ECODE 1: не удалось инициализировать (вероятно аппаратная проблема)
- 5: Throttle failsafe
- ECODE 1: дроссель упала ниже FS_THR_VALUE - это означает вероятную потерю контакта между приемником и передатчиком (Rx / Tx)
- ECODE 0: ошибока выше решена, контакт передатчика и приемника восстановлен
- 6: Battery failsafe
- ECODE 1: напряжение батареи упало ниже LOW_VOLT или общая емкость батареи превысила BATT_CAPACITY
- 7: GPS failsafe
- ECODE 1: потеря GPS фиксации по крайней мере как минимум 5 секунд
- ECODE 0: GPS фиксация восстановлена
- 8: Ground Station (Наземная станция) failsafe
- ECODE 1: обновления от наземной станции потеряна как минимум 5 секунд
- ECODE 0: обновления от наземной станции восстановлено
- 9: Fence
- ECODE 1: нарушена высота ограждения
- ECODE 2: круговой забор нарушен
- ECODE 3: высота и круговая ограда нарушены
- ECODE 0: аппарат вернулся внутрь забора
- 10: Flight Mode
- ECODE 0 ~ 10: квадрокоптер не смог переключиться на требуемый режим полета
- (0 = Stabilize, 1 = Acro, 2 = AltHold, 3 = AUTO, 4 = Guided, 5 = Loiter, 6 = RTL, 7 = Круг, 8 = Position, 9 = Land, 10 = OF_Loiter)
- 11: GPS
- ECODE 2: GPS Глюк
- ECODE 0: GPS Глюк устранен
- 12: Crash Check (проверка крушения)
- ECODE 1: Крушение обнаружено
EV (номер события) Полный список возможных событий можно найти в defines.h , но наиболее распространненые являются:
- 10 = Снят с охраны (Arming)
- 11 = Поставлен на охрану (Disarmig)
- 15 = Автоматическое снятие с охраны - (Auto Armed) (пилот поднял газ выше нуля и автопилот может свободно взять под контроль дроссельной заслонки)
- 16 = Взлёт (TakeOff)
- 18 = Полная посадка (Land Complete)
- 25 = Установка "Дома" (Set Home) (домашние координаты, которые былы захвачены)
GPS:
- Status - 0 = нет GPS, 1 = есть GPS, но без фиксации спутников, 2 = GPS с 2D фиксацией, 3 = GPS с 3D фиксацией
- Time: при GPS сообщили время с начала эпохи в миллисекундах
- NSats: количество используемых спутников
- HDOP : мера точности GPS (1,5 хорошо, больше 2.0 не так хорошо)
- Lat: Широта в соответствии с GPS
- LngG: Долгота в соответствии с GPS
- RelAlt: Акселерометр + Баро высота в метрах
- Alt: GPS высота (не используется контроллером полета)
- SPD: горизонтальная скорость движения в м / с
- GCrs: наземный курс в градусах (0 = север)
IMU (информация акселерометра и гироскопа)
- GyrX, GyrY, GyrZ: "сырые данные" вращения гироскопа в градусах/секунды
- AccX, Accy, AccZ: "сырые данные" значения акселерометра в м/с/с
INAV (инерциально-позиционная навигация и оценка скорости)
- Balt: высота барометра в см
- IALT: инерциальная оценка высоты навигации в см
- IClb: инерциальная навигационной оценкам скороподъемность в см/с
- ACorrX. ACorrY, ACorrZ: х, у и z-ось коррекции акселерометр в см/с/с
- GLat, Glon: GPS широта и долгота от дома
- ILat, ILng: инерциальная навигационная широта и долгота от "дома"
Mode (полетный режим)
- Режим: режим полета отображается как строка (т.е. STABILIZE, LOITER, и т.д.)
- ThrCrs: дроссельной круиз (от 0 ~ 1000), который является дополнением автопилота, чтобы работать дросселем для поддержания стабильного наведения
NTUN (Навигационная информация)
- WPDst: расстояние до следующей точки (или цель замирания) в см. Обновляются только в то время, когда режим LOITER, RTL, AUTO.
- WPBrg: "подшипник" (поворот?) до следующей точки в градусах
- PErX: расстояние до промежуточного ориентира между квадрокоптером и следующей точки в направлении широты
- PErY: расстояние до промежуточного ориентира между квадрокоптером и следующей точки в направлении долготы
- DVelX: желаемая скорость в см/с в направлении широты
- DVelY: желаемый скорость в см/с в направлении долготы
- VelX: оценка фактической скорости (акселерометр + скорость GPS) в направлении широты
- Vely: оценка фактическая скорости (акселерометр + скорость GPS) в направлении долготы
- DAcX: желаемое ускорение в см/с/с в направлении широты
- Dacy: желаемое ускорение в см/с/с в направлении долготы
- DRol: нужный угол крена (roll) в сантиметро-градусов
- DPIT: желаемый угол наклона (pitch) в сантиметро-градусов
PM (мониторинг производительности)
- RenCnt: DCM Количество ренормализационная - большое количество может указывать на проблемы в DCM (крайне редко)
- RenBlw: DCM ренормализационная раздутие Количество - сколько раз DCM пришлось полностью перестроить матрицу DCM с момента последнего мониторинга производительности. Обычно безобидное чило, но это число, постоянно растет может быть признаком того, что DCM имеет проблемы расчета отношения (крайне редко)
- FixCnt: количество GPS исправлений, полученных после последнего сообщения PM (трудно себе представить, как это будет полезно)
- NLon: количество длительных основных петель (т.е. петли, которые принимают более 5% , чем 10 мс они должны)
- NLoop: было показано общее количество петель после последнего сообщения PM. Обычно 1000 и позволяет вычислить процент медленных петель, которые никогда не должны быть выше, чем 15%.
- MaxT: максимальное время, что любой цикл принял после последнего сообщения PM. Это значение должно быть близко к 10 000, но будет до 6000000 в течение интервала, когда двигатели сняты с охраны (armed)
- PMT: число, увеличивается на единицу каждый раз, когда удар сердца, полученную от наземной станции
- I2CErr: количество ошибок I2C после последнего сообщения PM. Любые ошибки I2C может указывать на проблему на шине I2C, которые могут, в свою очередь, замедлить основной цикл и вызвать проблемы с производительностью.
RCOUT ( PWM/ШИМ выход для отдельных каналов )
- RC1, RC2, и т.д.: команда ШИМ отправлено от контроллера полета к выходу ESC / двигатель / RC
Просмотр KMZ файлов
При загрузке файлов журналов из APM система автоматически создает файл KMZ (файл с расширением .kmz). Этот файл можно открыть с помощью Google Earth (просто дважды щелкните файл), чтобы посмотреть свой полет в Google Earth. Пожалуйста, обратитесь к инструкции "журналы телеметрии" для дополнительных деталей.
