Список команд миссий ArduCopter
Эта страница содержит подробную информацию о всех командах в миссии поддерживаемых в конфигурации ArduCopter, которые могут выполняться как часть миссии ( в режиме автоматического полета / AUTO (полет-по-точкам)). Каждая из команд либо команда "Навигация" (Navigation) либо "Действие" (Do) . Навигационные команды (т.е. "взлёт" и "точка") влияют на местоположение квадрокоптера в то время как команды "действие" (Do) (т.е. "Do-Set-Servo" и "Do-Cam-Trigg-Dist") предназначены для вспомогательных функций и не влияют на местоположение квадрокоптера. Во время миссии команда "навигация" и "действие" может быть одновременно запущены. Команда "действие" будет запущена перед тем как начнется команда "навигация". Для получения дополниткельной информации о настройке миссий пожалуйста обратитесь к странице планирования миссий с точками и событиями.
Команды Mission Planner
Взлет / Takeoff
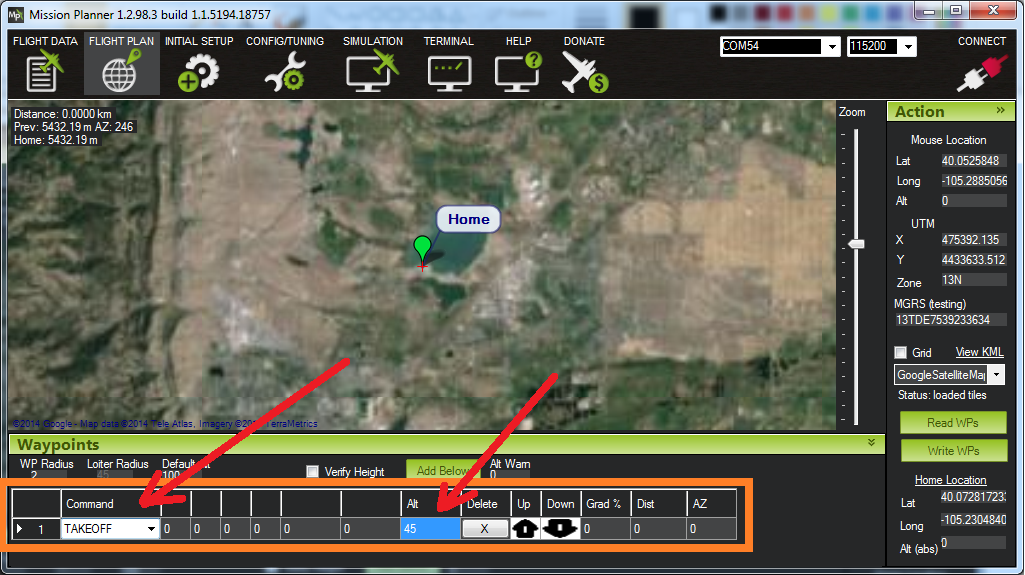
Аппарат будет подниматься вверх от своего текущего местоположения до высоты указанной в метрах. Это должно быть первой командой во всех миссиях. Если миссия начинается когда квадрокоптер уже летает, он будет подыматься вверх до указанной высоты. Если квадрокоптер уже выше указанной высоты , то переходя в выполнение миссии он будет игнорировать команду "взлёт" и перейдет к выпонению следующей команды.
Точка / Waypoint

Квадрокоптер будет лететь по прямой линии в место указанное в качестве точки ( по координатам долготы, ширины и высоты в метрах).
Параметры:
Delay / Задержка - количество времени (в секундах) что бы ждать в точке маршрута прежде, чем приступать к следующей команде.
Hit Rad - не поддерживается - предназначена для удержания расстояния (в метрах) от нацеленной точки, которая будет претендовать как на "пройденную" точку. Эта команда не поддерживается. Используйте параметр WPNAV_RADIUS (см. WP RADIUS) в скриншоте или настройче через "Parametr List". Даже WPNAV_RADIUS используется только когда путевая точка имеет задержку. Без задержки путевая точка будет считаться завершенной, когда виртуальная точка будет достигаться квадрокоптером. Это может быть 10 или более метров (от реальной координаты) по ходу движения, означающего, что квадрокоптер будет повернут в сторону следующей точки маршрута.
Yaw Ang - не поддерживается - означало угол поворота направления в градусах (0 = север, 90 = восток). Вместо этого используйте CONDITION_YAW команду (cм. ниже).
Lat, Lon - широта и долгода цели. Если оставить как ноль - она будет остановиться на текущем местоположении.
Alt - целевая высота над "домом" в метрах. Если оставить как ноль - будет поддерживать текущую высоту.
Loiter_Time

Квадрокоптер будет летать и ждать в указанном месте указанное количество секунд. Это миссия эквивалентна режиму Loiter.
Параметры:
Times / Время - количество секунд, что бы оставаться на месте.
Lat, Lot - координаты ширины и долготы цели.
Alt / высота - целевая высота над "домом" в метрах. Если оставить равную нулю то квадрокоптер будет сохранять текущую высоту.
Loiter_Turns
Выполнение этой миссии эквивалентно полетному режиму Circle. Квадрокоптер будет летать вокруг указанной точки (по координатам ширины, долготы и заданной высоты в метрах).
Радиус окружности задается параметром CIRCLE_RADIUS (т.е. не может быть установлен как часть миссии)
Параметры:
Turn - количество полных оборотов вокруг точки.
Dir 1=CW - направление вращения вокруг точки. Против часовой стрелки = - 1. Если положительное число - вращение по часовой стрелке.
Lat, Lon - ширина и долгота цели.
Alt - целевая высота над "домом" в метрах. Если оставить нулевое значение - квадрокоптер будет кружить на текущей высоте.
Loiter_Unlimited

Квадрокоптер будет лететь к указанной точке и ждать. Миссия не будет продолжена после этой команды.
Параметры:
Lat, Lon - ширина и долгота цели. Если оставить пустыми - квадрокоптер будет висеть над текущем местоположением.
Alt - целевая высота над "домом" в метрах. Если оставить нулевое значение - квадрокоптер будет кружить на текущей высоте.
Return-To-Launch

Эта миссия эквивалентра полетному режиму RTL. Как описано на этой странице квадрокоптер будет подыматься на указанную высоту заданым параметром RTL_ALT (по умолчанию 15 метров) , прежде чем вернуться домой. Домашняя точка устанавливается там, где он был снят с охраны (Arming). Эта команда не имеет параметров и как правило должна быть последней командой в миссии.
LAND

Квадрокоптер приземлится в текущем положении или в указанных координатах широты и долготы. Эта миссия эквивалентна полетному режиму LAND
Параметры:
Lat, Lon - ширина и долгота цели. Если оставить пустыми - квадрокоптер совершит посадку в текущем местоположении.
Do-Set-ROI

Головное направление квадрокоптера и "подвеса камеры" будет направленно на "область интереса" , она же ROI
В приведенном выше примеры нос и камера будут направлены на красный маркер на период выполнения команд, когда квадрокопер летел из путевой точки 1 к путевой точке 3. Если вы хотите, что бы носовое направление / камера смотрели на красный маркер при полете от 3 до 4 точки - вам потребуется вторая команда DO_SET_ROI , которая должна идти после команды полета к точке 3. (Примечание: В прошивке конфигурации ArduCopter 3.2 можно будет задавать за один раз точку, без её поворений)
Параметры:
Lat, Lon - ширина и долгота цели.
Alt - целевая высота над "домом" в метрах.
Condition-Delay

Существует возможность задержки до начала следующей команды "делать" в секундах. В приведеном выше примере команда №4 - установление "точки интереса" (у Do-Set-ROI) задерживается на 5 секунд так, что бы выполнить её, когда аппарат идет к путевой точке 2. Примечание: эта команда не останавливает квадрокоптер.
Параметры:
Time (sec) - время в секундах, что бы задержать следующую команду "действия".
Condition-Distance
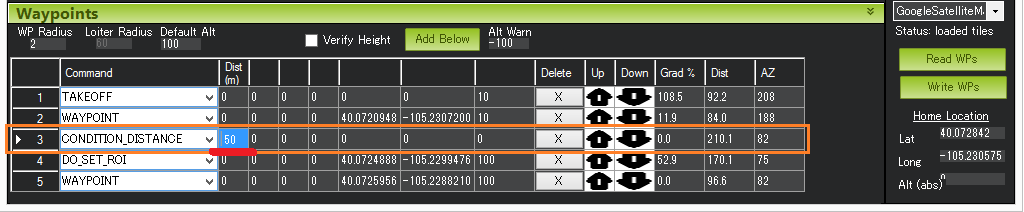
Задержка следующей команды "делать" пока квадрокоптер не находиться в пределах указанного количества метров следующей точки. В приведенном выше примере команда 4 (Do-Set-ROI) задерживается так, что она начинается после того, как квадрокоптер находиться в пределах 50 метров от точки 5. Примечание: эта команда не останавливает квадрокоптер во время миссии. она только влияет на команды "Do".
Параметры:
Dist (m) - дистанция в метрах, как близко должен находиться квадрокоптер до следующей точки, что бы выполнить команду "делать" (она же "Do").
Condition-Yaw

Эта команда направляет нос квадрокоптера на указаное направленик, когда он идет до следующей точки.
Параметры:
Deg - желаемое направление в градусах (0 = север , 90 = восток и т.д.)
Sec - не поддерживается - предназначена для ограничения скорости вращения (градусы в секунду) когда квадрокоптер поворачиваеся на желаемое направление.
Dir (1=CW, -1=CCW) - не поддерживается. предпологает возможность контроля вращения квадрокоптера влево или вправо. Он всегда будет поворачиваться в направлении, которое наиболее быстрое к его цели.
rel/abs - позволяет задать головное направление (т.е. Deg) как обсолютное направление (если "0") или по отношению к текущему курсу (если "1")
Do-Jump

Позволяет перейти к команде заданное число раз, прежде чем продолжить миссию. Пример выше даст квадрокоптеру команду полета обратно на точку 1 и 2 в общей сложности 3 раза, прежде чем он полетит до точки 4.
Параметры:
WP # - номер для перехода выпонения команды миссии
Repeat - максимальное количество выполнение команды. значение -1 означает бесконечное повторение.
Примечание: эа команда не должна использоваться на прошивке 3.1.2 или ранее (она правильно работает на прошивках ArduCopter 3.2)
Do-Change-Speed

Команда позволяет изменить горизонтальную скорость (в метрах в секунду) у квадрокоптера.
Параметры:
speed m/s - желаемая максимальная скорость в м/сек
Примечание: В конфигурации Arducopter 3.1.2 и ранее изменение скорости вступит в силу после того, когда команда навигации (т.е. команда путевой точки) завершиться. В версии 3.2 квадрокоптер сразу изменит скорость
Do-Set-Home

Эта команда изменит исходное положение, которое используется для возращения на старт ("Home" так же используется оригинальное положение для всех расчетов навигации).
Параметры:
Current(1)/Spec(0) - если задано "1" - использует текущее место положение в качестве нового "дома", если "0" использует указаную широту и долготу (см. на картинку, где пока нет описания!)
Lat, Lon - широта и долгота цели.
Примечание: В версии конфигурации ArduCopter 3.1.2 и раньше не используйте эту команду! В версиях 3.2 и выше она может быть использована для задания местоположения RTL , хотя трудно представить себе, почему это надо.
Do-Set-Cam-Trigg-Dist

Активизирование затвора камеры на основе расстояния. Например эта команда выше заставит работать затвор камеры, что бы запускать его после каждого 5м, которые летит квадрокоптер.
Параметры:
Dist (m) - интервал растояния в метрах.
Примечание: В конфигурации ArduCopter 3.1.2 и раньше эта команда не может быть отключена. Камера будет продолжать срабатывать несколько раз даже после того, как миссия была окончена. В версии прошивки 3.2 и выше установление значение равное нулю остановит затвор камеры от ключения.
Do-Set-Relay

Установит выходы реле (relay pins) кодами LOW или HIGH.
Параметры:
off (0) / on (1) - 0 = установить relay pin's LOW. 1 = установить relay pin's HIGH. 2 = инвертирование переключения (если было 0 - установится 1 и наоборот)
Delay - не используется.
Do-Repeat-Relay

Переключает цифровой выход "Relay Pin" в заданое число раз. В приведенном примере выше, при условии, что Relay Pin's было выключено и установление в положение HIGH произойдет заданое число раз , а затем через 3 секунды оно будет LOW.
Параметры:
Repeat # - сколько раз нужно переключить relay pin.
Delay (s) - количество секунд между каждым переключением.
Do-Set-Servo

Перемещение сервопривода до конктерного значения ШИМ (PWM). В приведенном выше примере сервопривод подключен к 8 каналу и будет установлен 1700 PWM (обычно значения в диапазоне от 1000 до 2000)
Параметры:
Ser No - выходной канал сервопривода.
PWM - значение ШИМ для вывода на сервопривод.
Do-Repeat-Servo

Команда позволяет многократно двигать сервоприводом назад и вперед между его средним положением и заданным значением ШИМ. В приведенном выше примере сервопривод крепиться к 8 каналу выхода APM и будет установлено значение 1700 ШИМ, после 4 секунд вернется в среднее положение (по умолчанию это 1500, который устанавливается параметром RC8_TRIM) после следующих 4 секунд он будет снова перемещен в значение 1700. В конце после 4 секунд он будет перемещен назад в среднее значение.
Параметры:
Ser No - выходной канал сервопривода.
PWM - значение ШИМ для вывода на сервопривод.
Repeat # - количество раз, что бы переместить сервопривод до указанного значения.
Delay (s) - задержка в секундах между каждым движением сервопривода.
Do-Digicam-Control

Команда позволяющая активизировать затвор камеры сразу. Эта команда не принимает дополительные аргументы.
Do-Mount-Control

Не поддерживается. Эта команда ничего не делает и не принимает никаких аргументов.
В будущих версиях этой команды можно указать угол крена, тангажа и рысканья, который примет подвес камеры Это может быть полезно для наведения камеры в конкретных направлениях во время миссии.
