Представляем конфигурацию ArduCopter для мультикоптеров
Arducopter сочетает передовые разработки среди квадрокоптеров, а технология автопилота обеспечивает автономный полет, который каждый может использовать. ArduCopter разработан и поддерживается с помощью специального группы добровольцев открытого исходного кода. Все последние изменения доступны на сайте в рамках проекта в DIYDrones.com .
Это руководство проведет вас через установки и настройки на свой первый полет.
- Что такое квадрокоптер и как он работает? Вы новенький в этом? Эта страница дает обзор того, как квадрокоптер летает и приводит некоторые соображения для начала работы.
- Что выбрать : готовый к полетам квадрокоптер или построенный своими руками ?
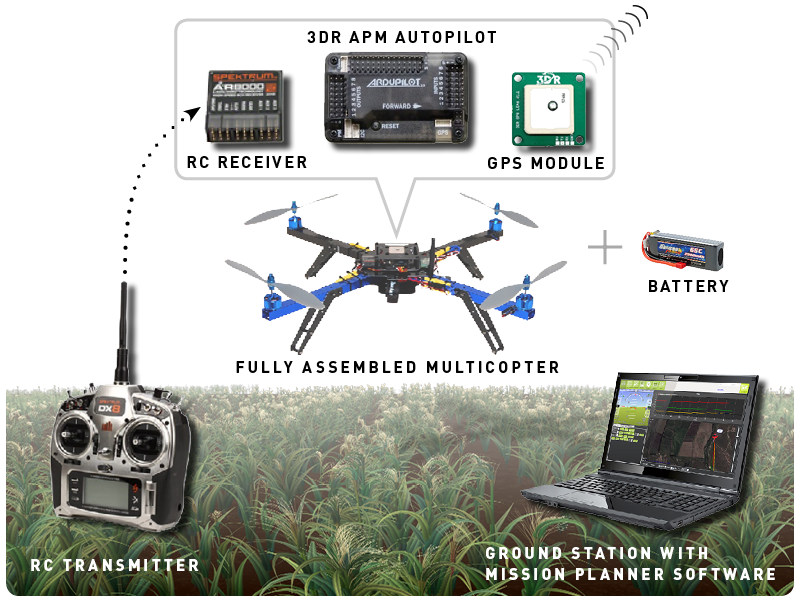
- Что вам потребуется - все компоненты, что нужно для автономного квадрокоптера плюс некоторые рекомендации для датчиков и аксессуаров.
- Информация по технике безопасности - ArduCopter является мощным, летающий роботом и требует сознательного понимания для соображений безопасности. Не пропустите этот важный раздел!
- Советы при управления квадрокоптером Несколько грамотных советов по пилотированию, которые помогут вам избежать больших неприятностей.
- Быстрый старт для уже собранного RTF квадрокоптера - Краткое руководство пользователя : Приобрел готовый к полету ArduCopter? Это руководство поможет вам быстро оказаться в воздухе, чем вы можете сказать: "беспилотный летательный аппарат".
- Постройка: квадрокоптер своими руками Небольшое вступление для тех кто задумывается о сборке квадрокоптера своими руками.
- Настройка ArduPilot в первый раз - Для тех, кто строит свой собственный квадрокоптер, сборка компонентов и готовность приступить к настройке ArduCopter
APM ArduCopter является простой в настройке и простой платформой для мультимоторных систем и вертолетов. Сегодня на рынке его особенности выходят далеко за рамки основного ручного управления мультимоторных систем. В отличие от ручного управления мультимоторных систем , ArduCopter является комплексным решением БПЛА, предлагая как класическое радиоуправление, так и автономный полет, в том числе по точкам, планирование миссий и телеметрии, отображаемые на наземной станции.
Система Arducopter находится на передовых позициях воздушной робототехники и предназначена для тех людей, которые хотят попробовать современныее технологии и новые стили полета.
Особенности включают в себя:
Высокоточная подержка удержания высоты позволит спокойно летать сразу. Или выбререте удивительный режим "простой полет" (Simple mode), что делает ArduCopter одним из самых простых в управлении. Не беспокойтесь за слежением орентации вашего квадрокоптера, пусть полетный контролер этим занимается сам! Вы просто отклоняете на стик, что бы придать направление аппарату, а автопилот выяснит, что "это" исходя из орентации используя компас на борту. "Вперед", "Назад" ... кого это волнует? Просто летайте!
Вам не потребуются знания в программировании. Просто используйте простую в использовании программу на рабочем столе, что бы загрузить последнюю прошивку одним щелчком мыши и настройте с помощью программного обеспечения Mission Planner нужные вам режимы. Используйте эту программу в качестве мощной наземной станции (Ground Station).
Сотни GPS точек ждут вас (точное число зависит от памяти полетного контроллера, ArduCopter подерживает 127 точек, но есть и более продвинутые системы на базе PX4). Просто поставте точку в Mission Planner и ArduCopter полетит к ним.
Расстоянию нет предела! Можно писать целые сценарии миссий, в том числе и управление камерой! "Loiter" ("слонятся/замри") в любом месте. Просто включите этот режим и аппарат зафиксирует свою позицию используя свой GPS и датчик высоты.
RTL (Вернуться на старте). Щелкните переключаетелем , что бы вернуть ArduCopter на место старта автоматически.
Планирование всех миссий доступны через опциональную двухстороннюю связь. Путевые точки, смена режимов полета, даже тюнинг может быть сделан с вашего ноутбука, в то время как аппарат находиться в воздухе!
Автоматический взлет и посадка. Просто введите аппарат в этот режим и смотрите как ArduCopter сам выполнит свою миссию полностью автономно, вернувшись домой сядет на землю перед вами.
В связи с богатым набором функций и полностью автономных возможностей АРМ, кривая обучения может выглядеть несколько пугающим. К счастью набор исчерпывающей информации сделает это стремление очень простым и достижимым.
Пожалуйста, не поддавайтесь искушению пропустить шаги и бросаться к быстрому полету. Это робототехника и авиация комбинированного типа из которых являются довольно сложными вещи сами по себе. Следуйте инструкциям и у вас будет свой робот в воздухе.
Автономные роботы, летающие машины, электрические системы высокой энергии, вращающиеся лопасти - это потенциально опасно. Всегда помните о технике безопасности это позволит вам остаться целым и не вредимым:)
Мы уделяем много времени безопасноти , пожалуйста будте предельно внимательны управляя этими технологиями. Этот продукт мы делаем для благожелательного использования.
Помимо официального зарубежного сайта разработчиков, которые помогут ответить вам на ваши вопросы вы можете обратиться и в русскоязычную группу Вконтакте.
