Краткое руководство пользователя для готового к полетам коптера (RTF)
Это руководство быстрого старта для пользователей. прошивка квадрокоптер уже загружена на APM 2.6
установите Mission Planner
перейдите на страницу загрузки и выберите самую последнюю версию.
Скачать Mission Planner последней версии
установите программу
Следуйте инструкциям до завершения установки программы. В процессе установки программа автоматически установит необходимые драйвера. Если у Вас возникает ошибка DirectX , то необходимо его обновление. Если вы получаете предупреждение, как показано на картинке ниже, выберите Установить драйвер для продолжение установки программы.
После установки программы запустите её, она автоматически информирует вас , если есть обновления. Пожалуйста используйте по возможности самую последнюю версию Mission Planner
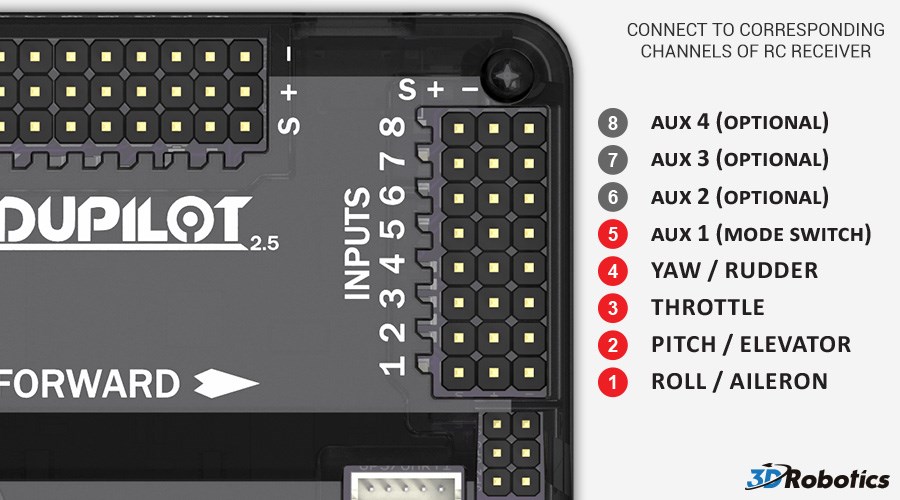
подключите радиоприемник: PWM или PPM сигналы
- для управления по радио через ШИМ (PWM) подключите радиоприемник к APM входных сигнальных контактов используя разъемы для подключения канала 1 к APM сигнала конекторами с надпиьсь 1 , канал 2 к конекторам 2 и т.д. Кроме того, необходимо убедиться в том, что приемник будет питаться от APM.
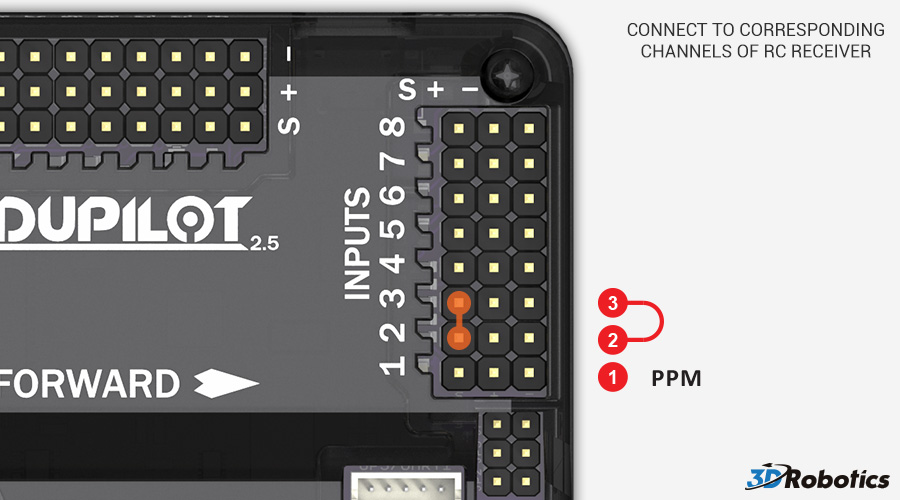
- для управления по радио через PPM необходимо подключить первый канал и перемкнуть перемычкой входы 2 и 3 , как показано на картинке. Выводы на приемнике могут варьироваться , поэтому обратитесь к документации на ваш приемник.
После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод. Не подключайте провод к USB-хабу , подключайте провод к компьютеру.

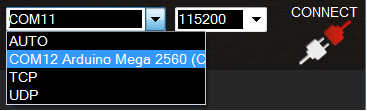
После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке
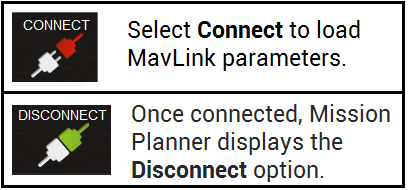
Выберите “соединение” в правом вверхнем углу экрана , что бы загрузить параметры MAVLINK в APM , Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.
Включите передатчик и убедитесь, что он в режиме самолета (Полетному контроллеру необходим режим полета , независимо от платформы на эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw), правая будет контролировать крен (Roll) и тангаж (Pitch) . Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” , нажмите на “калибровка” и правом нижнем углу, Mission Planner выведет окно, что батарея не должна быть подключена , как и моторы с пропеллерами.
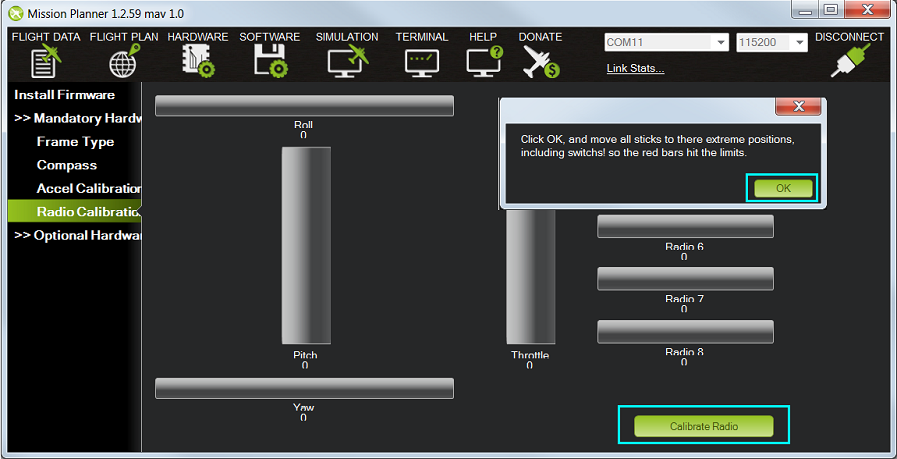
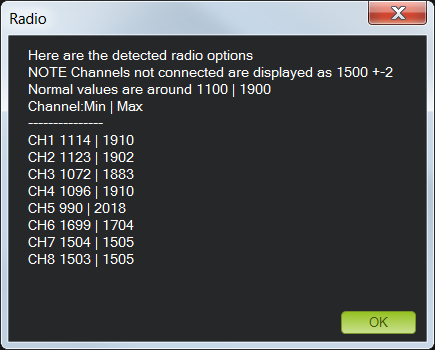
Нажмите “ок” и начните двигать стиками в каждую из сторон до предела, а так же трехпозиционный тумблер. наблюдайте за результатами, красные линии установят пределы минимамльного и максимального значения вашего радиопередатчика.
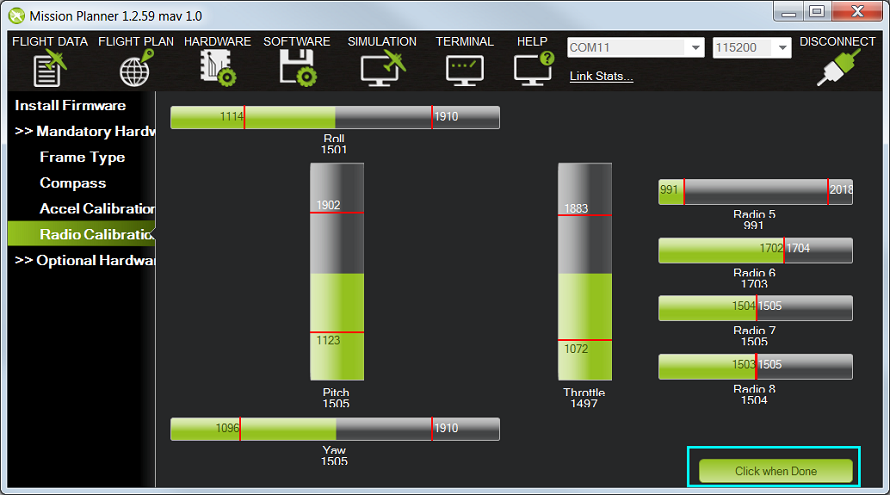
Когда все значения каналов радио смогли показать свой минимум и максимум нажмите в программе “Done”. Данные вам отобразятся в отдельном окне, нормальное значение около 1100 для минимума и 1900 для максимума.
Крепление пропеллеров
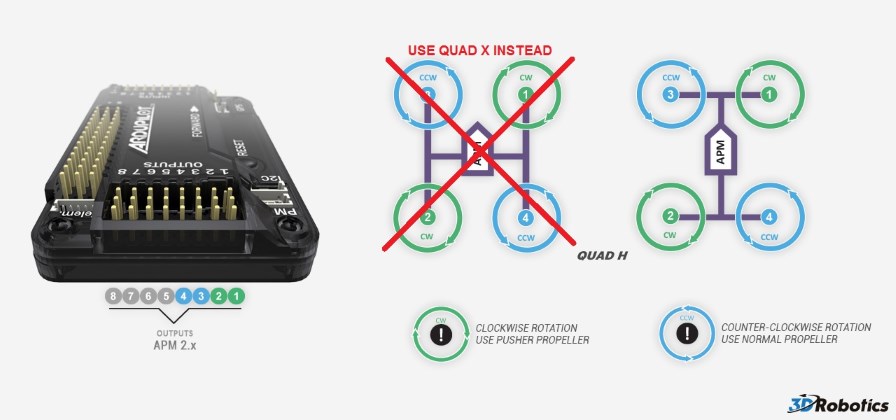
Винты должны быть прекреплены в соотвествии с конфигурацией, они устанавливаются в самую последнюю очередь , после того, как все настроено. ниже приводится схема и направление пропеллеров и стороны кручения моторов.
Конфигурация квадрокоптер X и Plus
 Конфигурация квадрокоптер H рама
Конфигурация квадрокоптер H рама
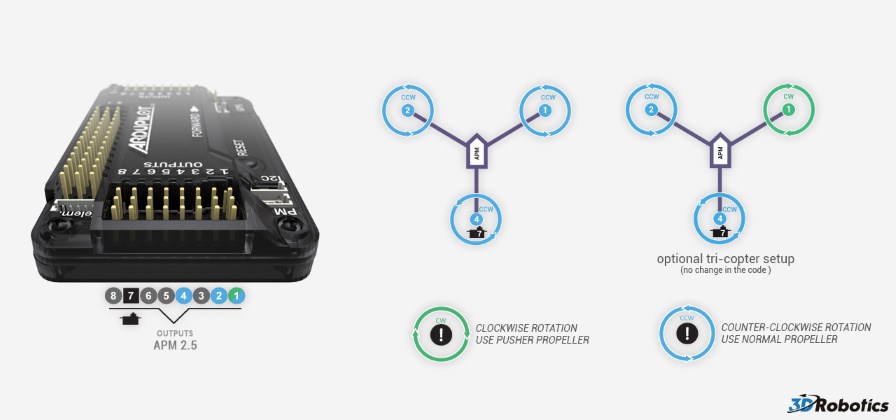
 Конфигурация трикоптер
Конфигурация трикоптер
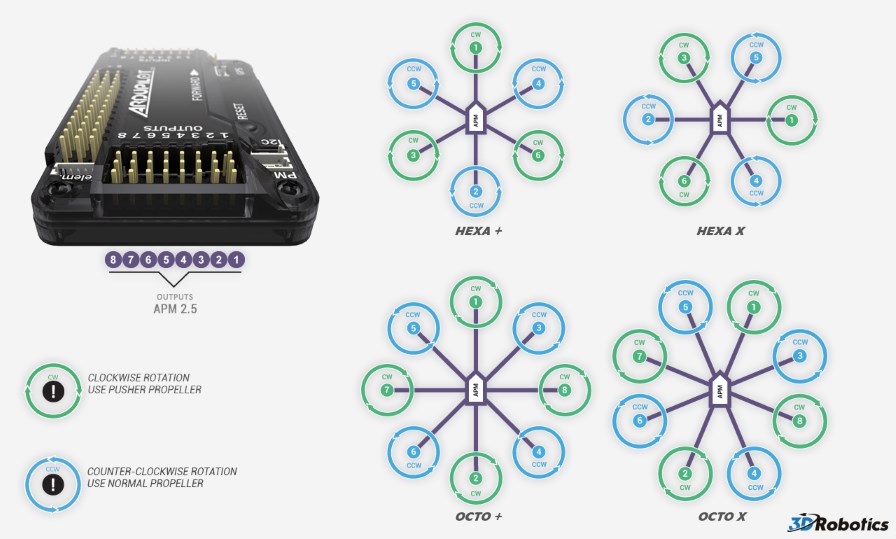
 Конфигурация гексакоптер и октакоптер
Конфигурация гексакоптер и октакоптер
 Конфигурация трикоптер Y6
Конфигурация трикоптер Y6
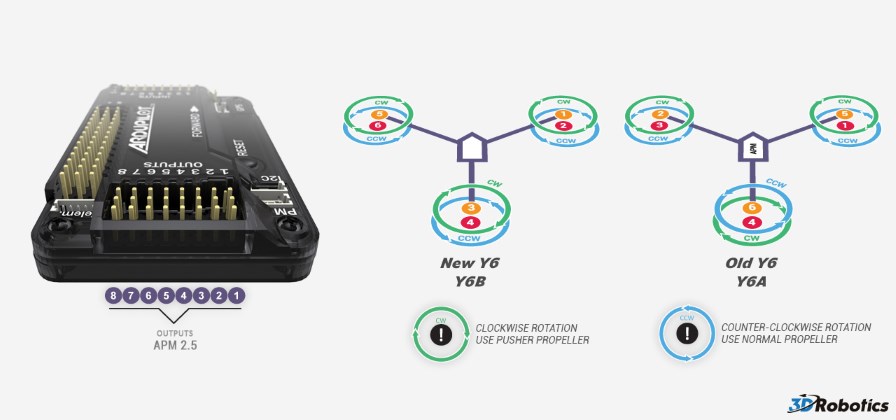 Конфигурация квадрокоптер X8
Конфигурация квадрокоптер X8

Предполетная информация
Безопасность это ключ в успешном полете. Пожалуйста изучите информацию по безопасным полетам перед полетами. Выберите безопасную площадку для полетов подальше от людей и всегда проверяйте работу всех органов управления и крепления перед подключением батареи. Прочтите вики раздел "первый полет" по снятию с охраны (arming) и постановке на охрану (disarm) квадрокоптера, так же по управлению и вариантам полетов.
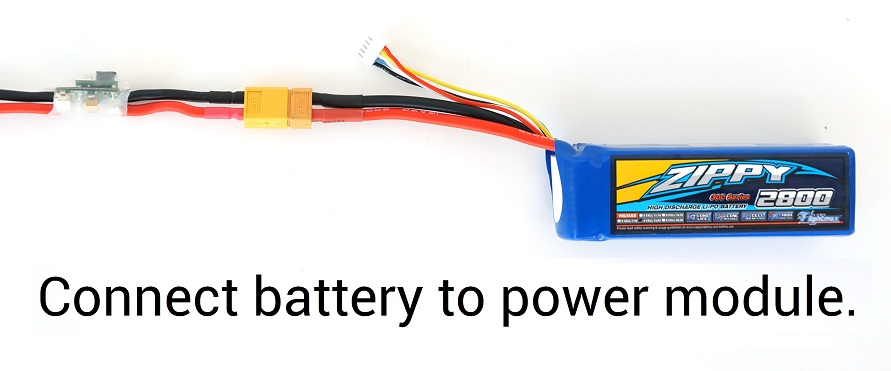
Когда все готово для полетов , установите квадрокоптер на взлетной площадке лицом от вас. Подключите заранее заряженную LiPO батарейку к разъемам. Следуйте безопасному снятию с охраны, что бы это не повлекло "сумашедший полет" (вики)
Последнее это подключение батарейки (предварительно включив аппаратуру со стиком газа утопленного в минимум)
Следующие шаги
Постепенно изучайте беспилотные полетные режимы, для получение всех возможностей от ArduCopter, включая режимы Loiter и полет по точкам
