Что такое квадрокоптер и как он работает.
В дальнейшем, где это возможно слово мультикоптер будет заменено на более ходовое слово на слуху - квадрокоптер
Квадрокоптер - это летающий аппарат, двигающися посредством регулировании скорости вращения двигателей с пропеллерами
- квадрокоптер это один из простых летательных аппаратов у которого много поклонников.
- квадрокоптер аэродинамически не устойчив и требует компьютерное управление для сабильного полёта.
- Поэтому квадрокоптер это целая “летающая система” и если его "компьютер" не работает, то он не летает.

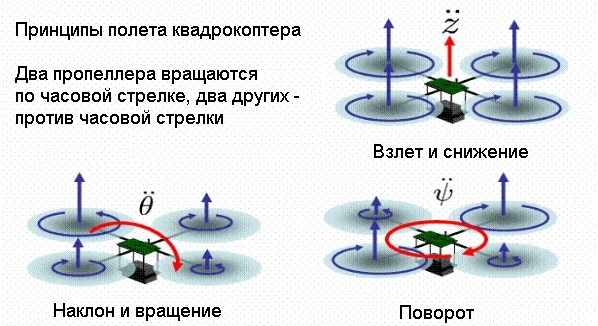
- квадрокоптер, как показан выше, является простым типом мультикоптеров , с каждой парой двигателей вращающихся в противоположную сторону.
- это позволяет ему использовать осевое вращение (Yaw) вправо или влево, посредством ускорения одной пары и замедлением другой пары двигателей.
- горизонтальное движение осуществляется за счет ускорения двигателями (увеличение тяги оборотами) на одной стороне и снижение тяги на другой.
- это позволяет наклонить квадрокоптер (Roll or Pitch) в нужном направлении движения , после чего тяга двигателей уравновешивается.
- угол наклона , как правило определяет скорость движения в этом направлении.
- что бы скомпенсировать порывы ветра компьютер наклоняет автоматически квадрокоптер в сторону направления порыва.
- для того, что бы это работало на квадрокоптере должны быть электронные “гироскопы”, которые измеряют уровень по трем осям
- помимо этого он может быть оснащен электронными акселерометрами, которые определяют смещение по трем осям
- контроль высоты и её изменение осуществляются путём ускорения или замедления оборотов двигателя.
Cистема мультикоптера:
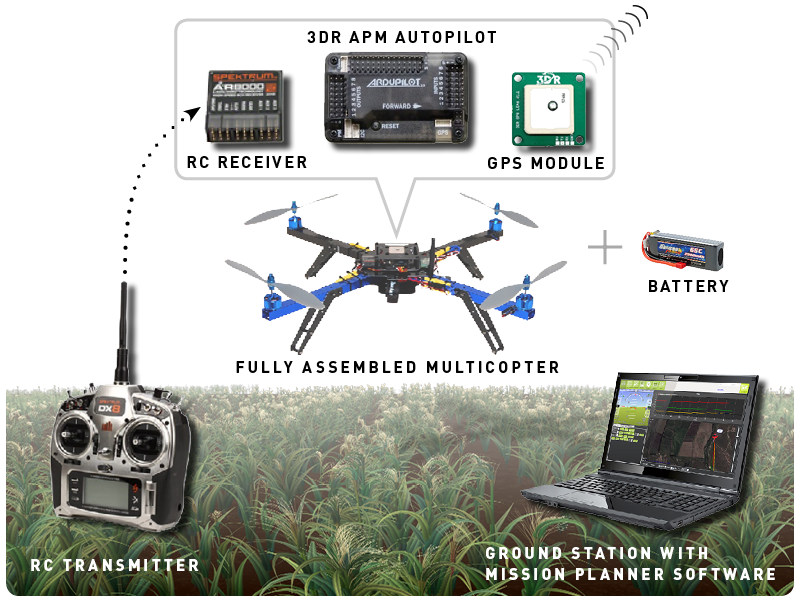
Для того, что бы летать вам нужно:
- сам квадрокоптер, включая раму, моторы, регуляторы скорости (ESC) винты (пропеллеры) и батареи
- Полетный контроллер или автопилот, который обеспечивает стабилизацию и в более развитых системах (таких как APM 2.6) автоматический контроль.
- Компьютер или ноутбук (телефон, планшет) для того, что бы запрограмировать полетный контроллер (что не обязательно) и для использования в качестве телеметрической наземной станции.
Демонстрационное видео демонстрирующее ручное и автоматическое управление.
- Полет начинается с режима Stabilize “стабилизация” , который обеспечивает стабилизацию по горизонту и ручное управление.
- Loiter Mode - квадрокоптер автоматически подерживает позицию и высоту , но допускает ручное управление.
- Simple Mode - позволяет управлять квадрокоптером без учета орентации ( используя компас)
- Auto Land - автоматическая посадка и переход в режим постановки в охрану (Disarm) , когда он приземлится.
Важные элементы для квадрокоптеров:
Основные требования квадрокоптеров это обладание досаточной тяги у моторов пропеллеров , способные его поднять:
- Благодаря тому, что технологии литиевых батарей позволяют это сделать
- Предыдущие технологии не позволяли обладать достаточным потенциалом и были слишком тяжелые и не производительные.
- Бесщеточные двигатели (Brushless motor) и электронные контроллеры скорости (ECS) повышают полетные характеристики, выносливость моторов и их надежность (работа на отказ). при разумной дисциплине можно летать в дождь и не волноваться за моторы.
- Карбоновые , алюминевые и стеловолоконные технологии облегчают вес давая эфективность и производительность по соотношению к весу апарата.
- Полетный контроллер (ArduPilot) является мозгом , который позволяет квадрокоптеру творить потрясающие вещи.
- Группа разработчиков опирается на APM контроллер , который имеет хороший потенциал
- В полетный контроллер встроенно много датчиков, необходимых для автоматического полета
- В эту систему включены : трех осевой гироскоп, трех осевой акселерометр, компас (магнитометр) , барометр (высотомер) и GPS.
- ArduPilot подключается к моторам , радиопередатчикам, телеметрии и камеры контроля.
- Современные радиоуправляемые системы 2.4МГц обеспечивают быструю и очень надежную связь с квадрокоптером.
- Программа Mission Planer позволяет обновить прошивку Автопилоту
- Программа так же позволяет загружать пользовательские параметры (миссии / точки) и прочие инструкции в квадрокоптер.
- Кроме того, можно использовать планирование миссии полета , анализировать журналы полета записаные на автопилот.
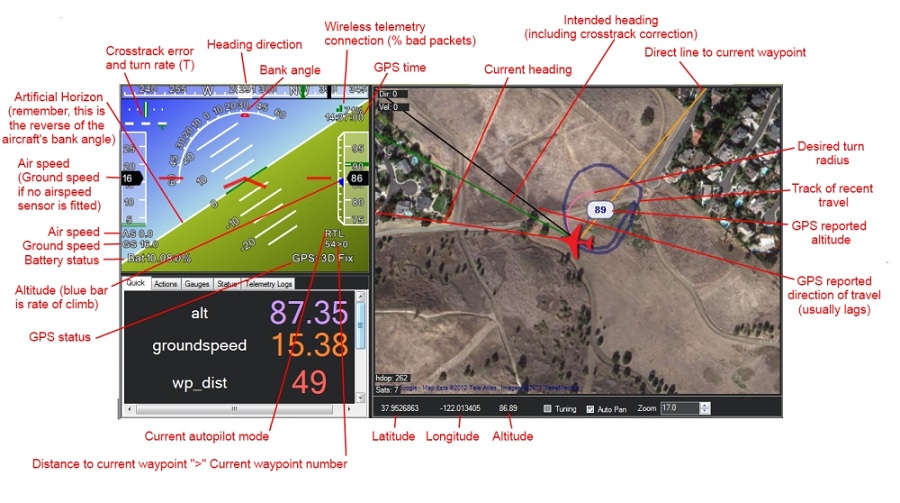
- А еще программа может работать как телеметрическая наземная станция (Ground Station) , где отображаются в реальном времени данные полета.
Требования к проектированию мультимоторных аппаратов
- Квадрокоптер - устойчивая система , но ей нужнен тщательно подобранные компоненты.
- Прогнозируемый вес, производительность, время полёта и полезной нагрузки - это требует сбалансированного подхода, что бы добиться хороших результатов.
- Высокая производительность, как у квадрокоптеров (quadrocopter) для хобби или использования камеры (сьемок с воздуха) требуется уже более тяжелоподъемный мультикоптер - гексакоптер, октакоптер (hexacopter, octacopter)
- Размер рамы и её вес, двигатели и пропеллеры, мощность батареи и полезная нагрузка - являются важными параметрами при постройке мультикоптера.
- Небольшой квадрокоптер (quadrocopter) идеально подходит , что бы научиться летать, хорош для новичков, которые осваивают это.
- Большой гексакоптер (Hexacopter) или октокоптер (Octacopter) с камерой для съемок дорогой и серьезный аппарат, требует професиональных навыков.
- это сильно бъет по карману, в случае его падения и это стоит учитывать.

