Точки возврата / Rally Points
Обычно когда самолет или квадрокопер входит в полетный режим RTL (возврат на точку запуска) (а еще этот режим срабатывае при настроенной защите отказа - failsafe) то по умолчанию, что бы вернуться на точку старта, он летит по прямой и бывают такие случаи, когда это нежелательно. Например это может быть область, где много людей или проблемное место, где работа RTL нежелательна. Это возможно, когда план полета достаточно большой и вход квадрокоптера в режим RTL нежелателен, что бы пройти по прямой весь путь к точке взлёта.
По этой причине мы теперь поддерживаем создание нескольких "точек возврата" (или Rally Points). Если квадрокоптер входит в режим RTL и точки возврата определены то он полетит до ближайшей ралли-точки для посадки, а не возращаться в исходное положение (полет до домашней точки). Поведение самолета будет, как и в режиме Loiter, полетом по кругу в ралли-точки, а квадрокоптер будет выполнять автоматическую посадку (Land).
Настройка ралли-точки
Выполните следующие шаги для определения Ралли-точек в ПО Mission Planner:
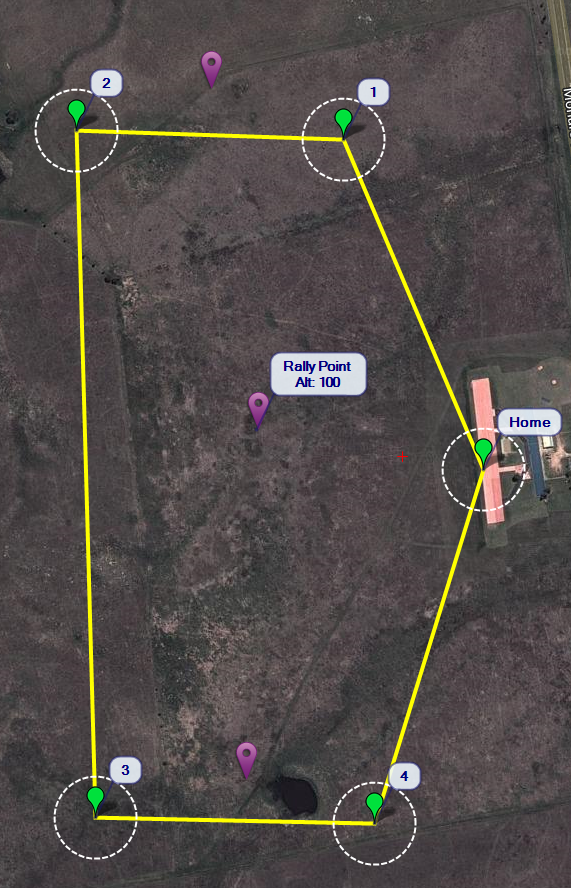
Выберите мышкой на карте желаему широту и долготу. В Разделе Plight Plan установие нажатием кнопки мышки на карте курсок и выберите из контекстного меню пункт Rally Points и установите точку выбрав Set Rally Points. Обратите внимание, что данная работа проводиться в экране планировщика полетов (Flight Plan) а не экрана данных рейса (Flight Data):

Высота "ралли" должна быть указана (обратите внимание, что она по умолчанию для ралли-точки такая же , как и значение высоты маршрута по умолчанию):


Повторите все эти действия для нужных ралли-точек
Загрузите в квадрокоптер ралли-точки выбрав из контекстного всплывающего меню правой кнопкой мыши "Upload"
Следует учесть следующие при использовании ралли-точек:
- При использовании Geofence: обеспечте нахождение ралли-точек внутри геозоны.
- Убедитесь в том, что ралли-точка достаточно высока, что бы не зацепить деревья, рельев и здания.
- Из-за ограничения размера флеш-памяти на ArduPilot Mega число ралли-точек будет ограничеваться 10-ю. На самолете 6-ю. На квадрокоптере этот предел может быть расширен при использовании других платформ, таких как PX4 или Pixhawk в будущем.
- В конфигурации прошивки самолета радиус Loiter для ралли-точки такой же, как и в остальных точках режима Loiter, определяется параметром WP_LOITER_RAD.
- Параметры ALT_HOLD_RTL / RTL_ALT не используются с ралли-точкими, самоле будет идти в ралли-почку на высоте , указанной при добавлении этой точки.
- Параметр RALLY_LIMIT_KM - это максимальное расстояние до "ралли-точки", которое может быть от квадрокоптера или самолета, которое будет рассматриваться на событие режима RTL. Если дистанция до "ралли-точки" больше, чем растояние от самолета или квадрокоптера до домашней позиции то используется событие режима RTL с возвратом домой ( на высоте ALT_HOLD_RTL ), а если домашняя точка (Home Position) дальше , чем ближайшая ралли-точка - используется ближайшая ралли-точка. Этот параметр для того, что бы предотвратить улет, если ралли-точки были указаны для нескольких полей на которых вы летаете. Этот параметр может быть отключен, если установить его в 0.
- Параметр RALLY_TOTAL - это число "ралли-точек", указанных в настоящее время. Этот параметр будет установлен для вас вашей наземной станцией управления (например Mission Planner), когда вы добавляете или удаляете "точки". Маловероятно, что вы установите этот параметр вручную и это небезопасно делать. RALLY_TOTAL должен быть 0, если вы не указали ни одной "ралли-точки" и в этом случае домашнее местоположение (Home Position) будет использоваться для событий RTL.
Следующие параметры протокола MAVLink будут контролировать поведение "ралли-точек"
Пример полета
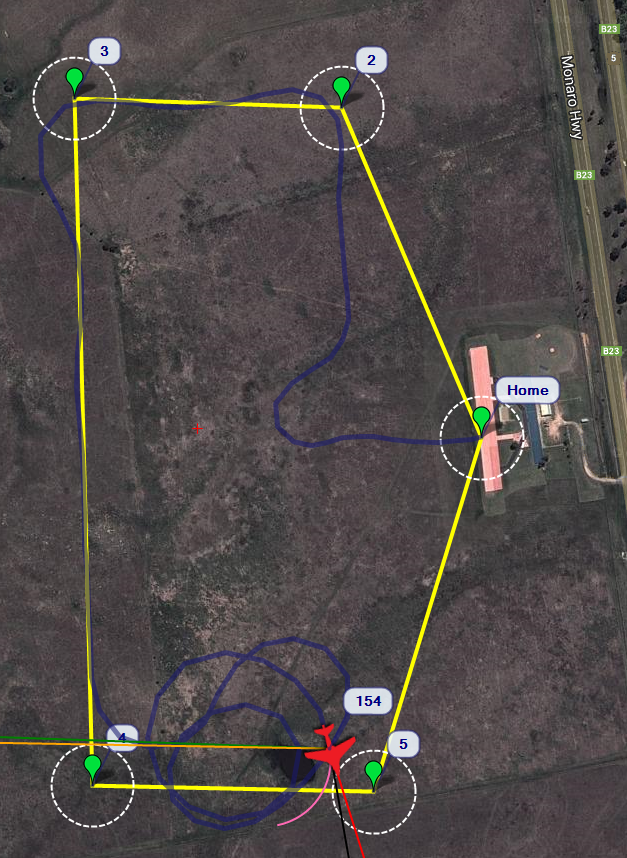
Полет в котором сработало событие RTL , после которого самолет стал кружить возле южной точки в режиме LOITER
