Использование наземной станции
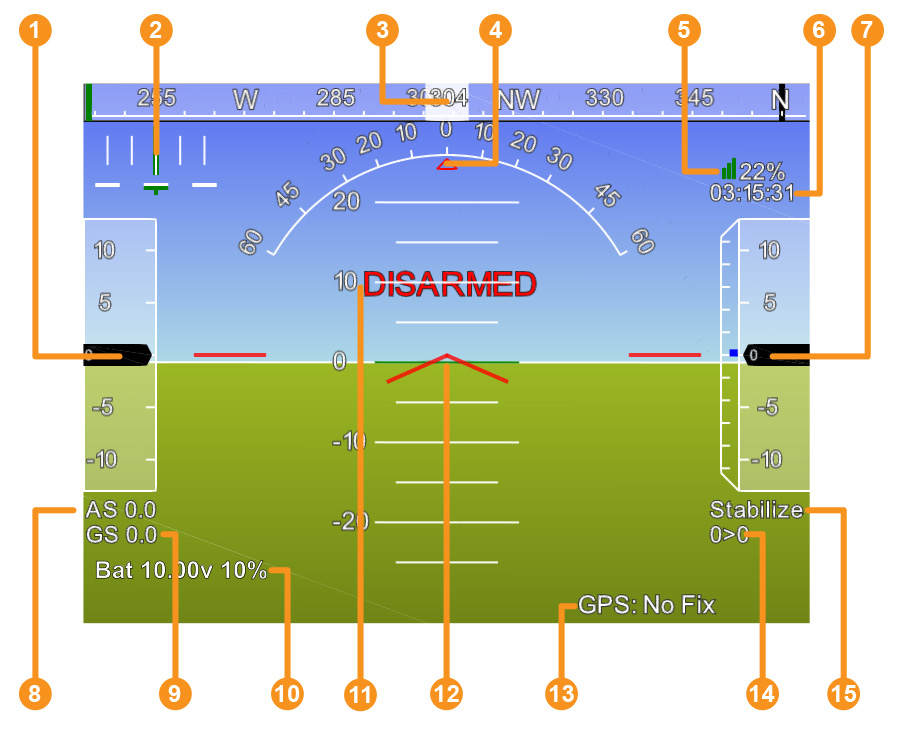
- Скорость в воздухе (путевая скорость, если ни один из датчиков воздушной скорости не установлен)
- ошибки Crosstrack и коэфициент повторения (Т)
- Курсовое направление
- Угол наклона по крену
- Коэффициент качества телеметрии (в проценах плохие пакеты)
- Время GPS
- Высота над уровнем моря (синий бар скороподъемность)
- Air Speed
- Ground Speed
- Состояние батареи
- Искусственный горизонт
- Уровень горизонта
- Фиксация спутников GPS
- ---
- Текущий полетный режим

Все показанное выше является основным видом наземной станции Mission Planner , показывая Heads-Up-Display (HUD). Если полетный контроллер Ardupilot находиться в режиме полета и вы подключены через протокол MAVLink (обычно это через модули телеметрии на скорости 57600 бод, но он будет работать и через USB на земле) данные и местоположение покажет телеметрия , получая данные с борта APM.
Вот несколько советов:
- Карта будет показывать ваше текущее местоположение, когда у вас есть фискация спутников GPS или вы используете симулятор полета.
- Помние, как работают искуственные горизонты: когда самолет наклоняется враво, горизонт наклоняется влево. (просто наклоните голову и вы поймете что я имею ввиду). Это нормально! пожалуйста не говорите нам , что все наоборот :-)
- Для конфигурации APM ArduCopter отображение сообщения таков:
- "WPDist": расстояние до следующей точки в метрах
- "Bearing ERR": Как далеко ваш БПЛА от линии направления до следующей точки
- "Alt ERR": Как далеко ваш БПЛА от указанной высоты
- "WP": Следующая путевая для достижения
- «Mode»: Текущий режим автопилота.
- Вы можете менять полетные режимы и давать другие команды в воздухе с Mission Planner и другой наземной станции (GCS's), но учтите, что вы должны контролировать автопилот , что бы они вступали в силу.
- Если вы щелкните двойным щелчком по окну HUD , то оно станет плавающим и его можно раскрыть на втором экране.
- Если вы дважды щелкните на "Speed GUAGE" , то можно поменять максимально отображаенмую шкалу.
- Можно поменять голос используемый в синтезе речи в центре специальных возможностей панели управления Windows. Зайдите в раздел "текст и речь" и выберите нужный вариант.
- Еслы вы установите флажок Tuning и дважды щелкните по тюнингу - вы можете построить любой график данных, которые доступны на вкладке. Это означет, что вы можете иметь много опций для отображения в реальном времени.
- Вы можете использовать пользовательские образы карты вместо Google Maps. нажмите CTRL-F , это позволит загружать собственные карты (orthophotos). Используйте Globalmapper так как в насоящее время это один из ключевых в экспорте в требуемом формате для Mission Planner.
Guided Mode / Режим наведения
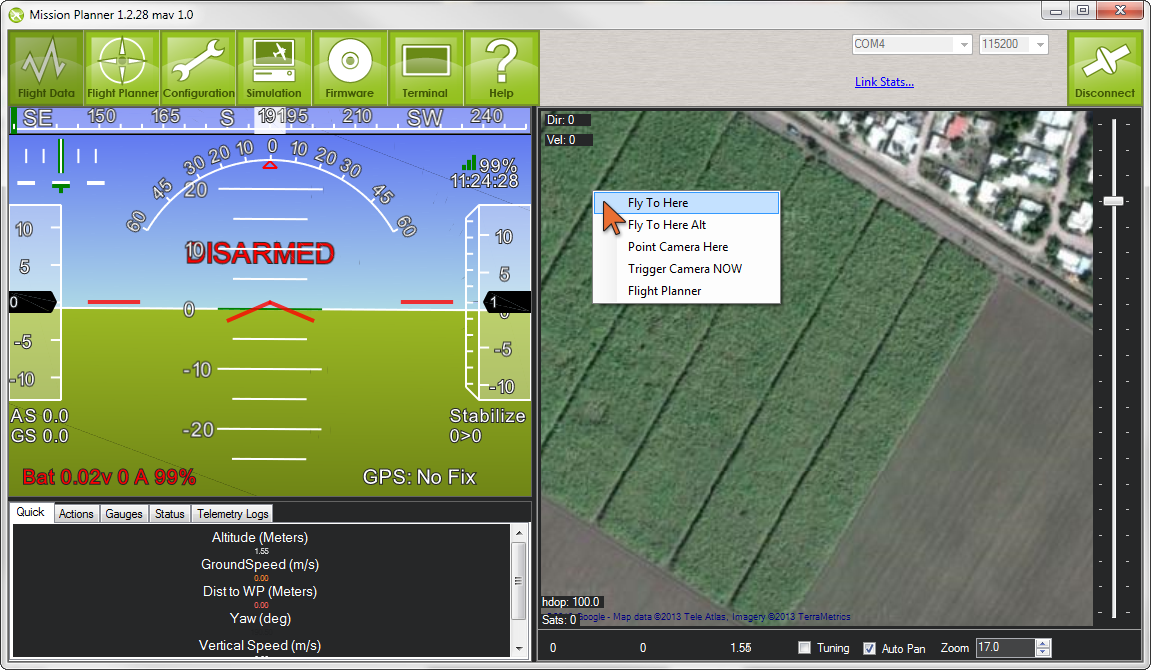
Одним из наиболее часто используемых функций у БПЛА является полет на указанную в реальном времени точку. Вместо того, что бы предварительно планировать миссии или вручную летать БПЛА операторы могут просто нажать на карту и дать команду "лети сюда".
Это реализовано в Mission Planner. На карте наземной станции вы можите щелкнуть правой кнопкой мыши и на карте просто выбрать "Fly to Here" БПЛА полетит дула и будет в режиме Loiter пока вы не дадите ему другую команду. Мы называем это "режим наведения". Есть несколько комманд и режимов которые будут реализованы в ближайшее время для расширения встроенной функциональности.
Примечание: Режим наведения - это отдельный режим. Если вы переключаетесь в него - вы будете оставаться в нем, пока не дадите команду на смену режима. Так что если вы сообщите "лети туда сейчас" , как только он прибудет в точку назначения он будет слоняться (Loiter) пока вы не скажите ему что-то другое, что бы сделать еще. Что-то еще может быть новая команда "лети туда сейчас" или смена полетного режима на другой. Если вы измените полетный режим на AUTO то ваша миссия возобноситься там, где она была прервана.
