Журнал данных с телеметрии Mission Planner
Типы журналов (память полетного контроллера или tlogs - телеметрический журнал)
Есть два пути для запиши ваших полетных данных с ArduCopter, вы можите выбрать любой из путей:
- Журнал полетного контроллера (dataflash) - используется на плате полетного контроллера apm с 16Мб памяти на борту, вы можите скачать после полетов. (см. раздел загрузка и анализ логов apm arducopter
- Журнал телеметрии (так же известный , как "tlogs" и описанный на этой странице) может быть записан с помошью ПО Mission Planner когда вы подключены с вашим APM через телеметрические радиомодемы или USB
Где и как создаются телеметрические логи (tlogs)
Tlogs записываются с телеметрического протокола MAVLink обменивающегося сообщениями между полетным контроллером и наземной станцией и автоматически создаются , когда вы нажимаете в ПО Mission Planner кнопку "connect".
Формат файлов именуется как YYYY-MM-DD hh-mm-ss.tlog и находиться в подпапке вашего ПО Mission Planner или в заранее указанной вами папке в настройке ПО Config/Tuing->Planner.
Помимо файлов ".tlog" создаются файлы ".rlog". Они содержать все данные .tlog c дополнительной отладочной информацией из Mission Planner. Они не могут быть разобраны или проанализированы поэтому вы должны их игнорировать.
Настройка частоты данных телеметрии
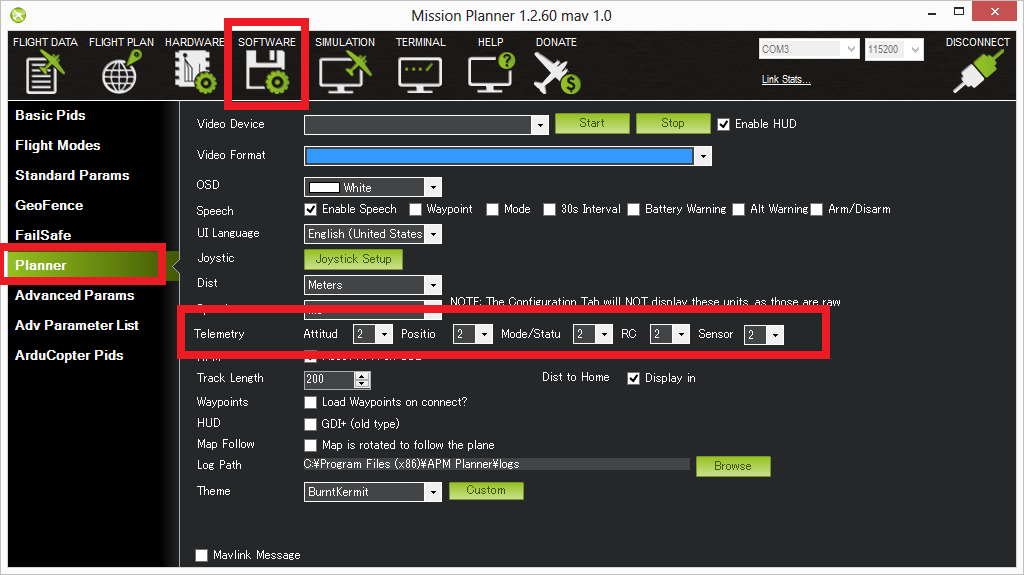
Желаемую скорость данных посылаемых с полетного контроллера APM до наземной станции можно настроить в ПО Mission Planer -> Software -> Planner в выпадающем списке Telemetry. Все данные передаваемые по телемерии так же записываются в TLOG файлы, частоту данных которую можно регулировать.
Обратите внимание, что особенно на конфигурации ArduCopter , из-за ограничения ресурсов процессора фактическая скорость данных переданная и сохраненная может быть ниже , чем установленная.
Воспроизведение миссиий
Если вы используете беспроводну телеметрию и у вас установленно соединение между полетным контроллером APM и ПО Mission Planner ваши полетные данные будут автоматически записаны. Вы можете проиграть их из журналов следующим способом:
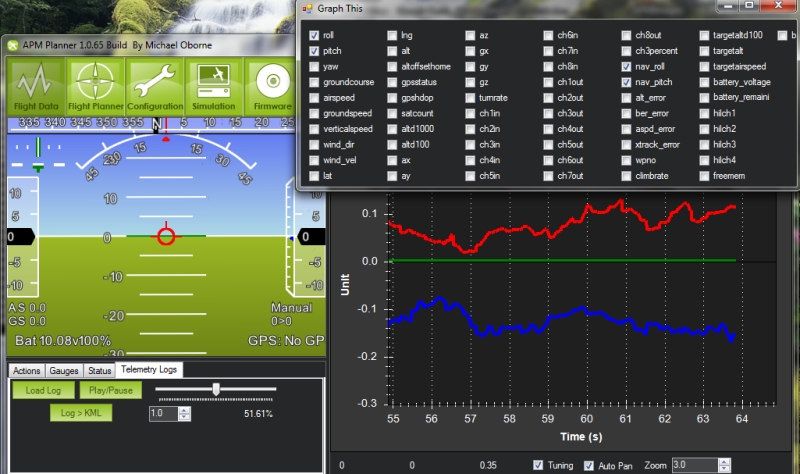
- Откройте раздел Fligt Data
- Щелкните по вкладке "Telemetry logs"
- Нажмите кнопку "Load Log" и найдите полетный tlog файл
- Нажмите кнопку "Play"

Вы так же можете установить интересующий вас временной интервал двигая ползунок и выбрать скорость воспроизведения нажимая клавиши скорости.
Проигрывая журнал информация экрана HUD будет изменяться и местоположение аппарата будет обновлятся как это происходит в полете. Индивидуальные значения можно увидеть через вкладку Status и отобразить на графике нажав на "Tuning". Затем двойным щелчком на данных вызвать окно с дополниельными параметрами , которые вам потребуется отображать. Это покажет записаные данные в процессе полета.
Создание 3D пути полета.
Вы можете создать KMZ файле делая следующее:
- Откройте экран "Flight Data"
- Щелкните по вкладке "Telemetry Logs"
- Нажмите на кнопку "Tlog > KML or Graph"
- Нажмите на кнопку "Create KML + GPX"
- Выберите полетный tlog файл

Файлы .kmz и .kml будут созданы рядом с оригинальным .tlog и их можно открыть в Google Earth для интерактивного просмотра 3D полета. Вы можете открыть kmz файл в Google Earth для просмотра полета или пути. Просто дважды щелкните на файл или перетащите его в Google Earth.
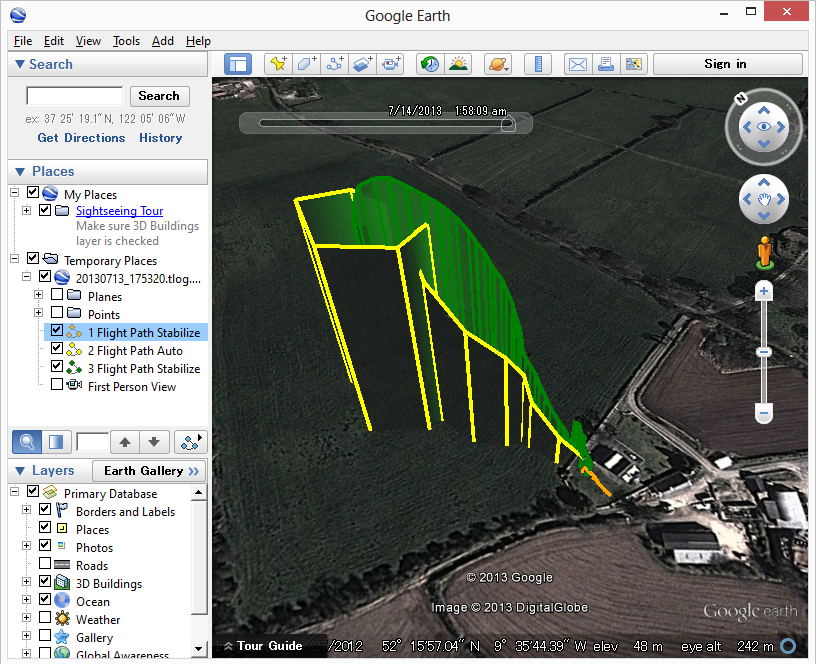
Различные режимы полета будут отображены разными цветами дорожек. Вы можете изменить детали отображения пути и цвета делая следующее:
- Найдите файл журнала в панели слева "Places". Он должен появиться в папке "Temporary Places"
- Щелкните на индивидуальный путь и выберите "Prooerties" для окрытия окна редактирования пути
- Цвет можно поменять на вкладке "Style, Color"
- Область ниже может удалена/добавлена на вкладке "Altitude" снятием/установкой "Расширеный путь до земли"
Извлечение параметров и путевых точек
Вы можете извлечь параметры и путевые точки из tlog следуя тем же действиям, что и для создания KML файла исключая последний шаг выберая "Extract Params" или "Extract WP's"
Извлечение параметров создаст .param файл который будет рядом с tlog. Этот файл (.param) содержит полный список параметров (в том же порядке, как они появляются в EEPROM) вмесе с их значениями во время полета. Они могут быть открыты в экселе или текстовым редактором.
Извлечение путевых точек создаст один или несколько .txt файлов любых миссий загруженных на полетный контроллер APM. Эти файлы могут быть открыты в Mission Planner переключившись на экран "Flight Plan", правой кнопкой мыши на карте выбрать "File load/save", "Load WP File".
Графические данный из полета
Даные из полета могут быть отображены графически , для этого выполните следущее:
- Откройте Flight Data экран
- Нажмите на вкладку "Telemetry Logs"
- Нажмите на кнопку "Tlog > KML or Graph"
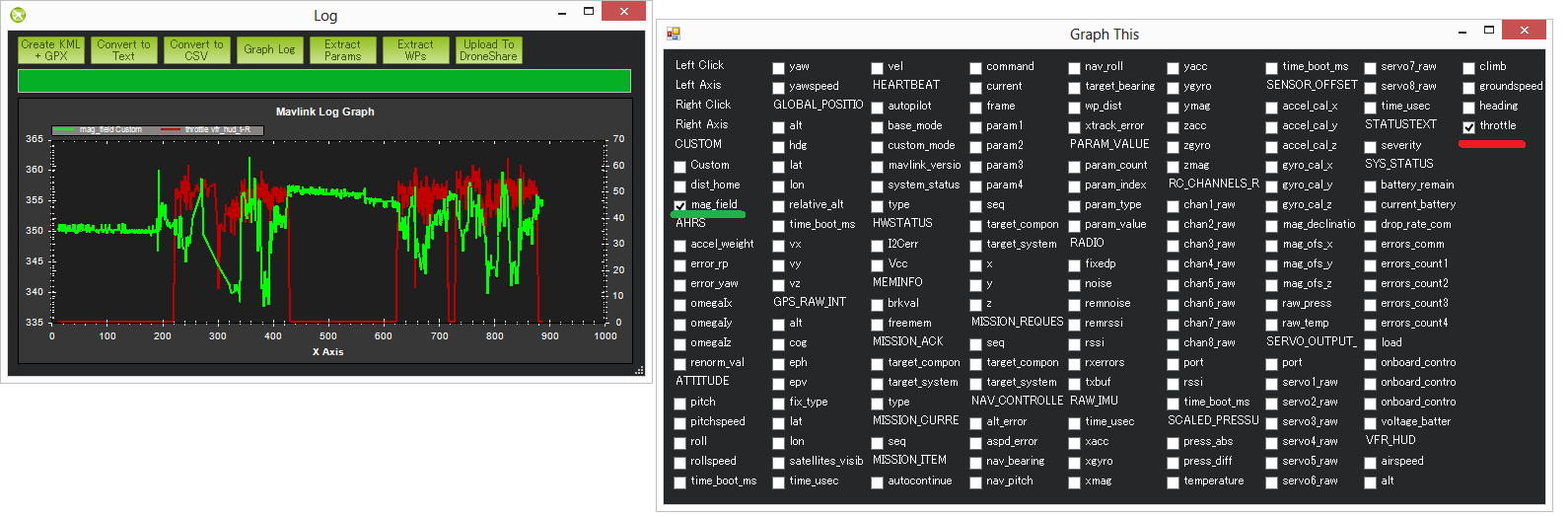
- Нажмите на кнопку "Graph Log"
- Выберите нужный файлt полета log

- Когда появиться экран "Graph This" используя кнопку мыши выберите нужный пункт на основе которого вы желаете построить график. Обратите внимание, что элементы сгруппированы по категориям, таких как "RC_CHANNELS" и "RAW_IMU".
- Если вы используете левую кнопку мыши маштаб для элемента появиться слева от графика. Если правую, то справа.
- Устанавливайте флажок несколько раз что бы выбрать необходимый цвет.
- Изменить величину графика можно с помошью колеса мыши , выбирая область графика зажмите левую клавишу или щелкнув правой кнопкой на графике выберите "Set Scale To Defaul" для сброса величины.