Подключение радиоприемника и моторов
Подключение входов радиоприемника
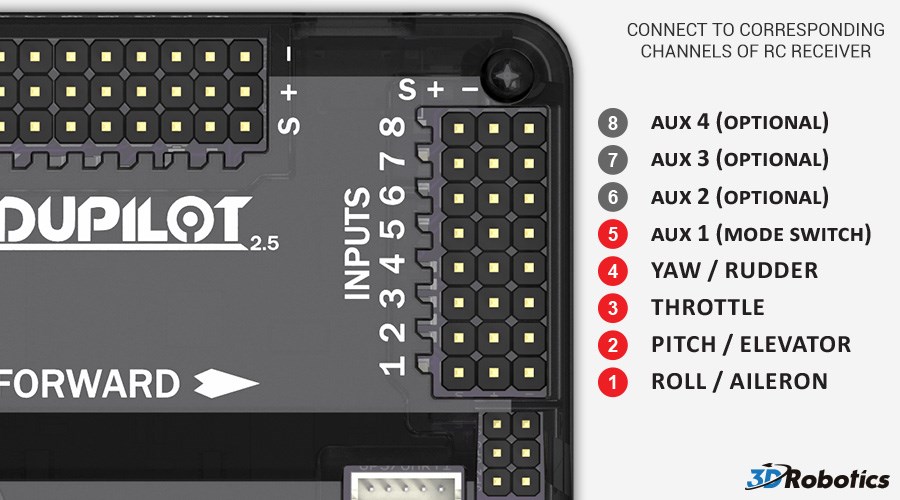
Подключите сигнальные контакты радиоприемника "S" (сигнал) c контактыми "S" на входы APM, используя для этого специальный кабель. Если у Вас имеется трехжильный кабель, то первый канал приемника и APM необходимо подключить именно им, это даст возможность запитать радиоприемник, а остальные канали можно подключить только контактом "S", это даст небольшое преимущество компактности и веса. ссылка на подробности Power и важных предупреждений.
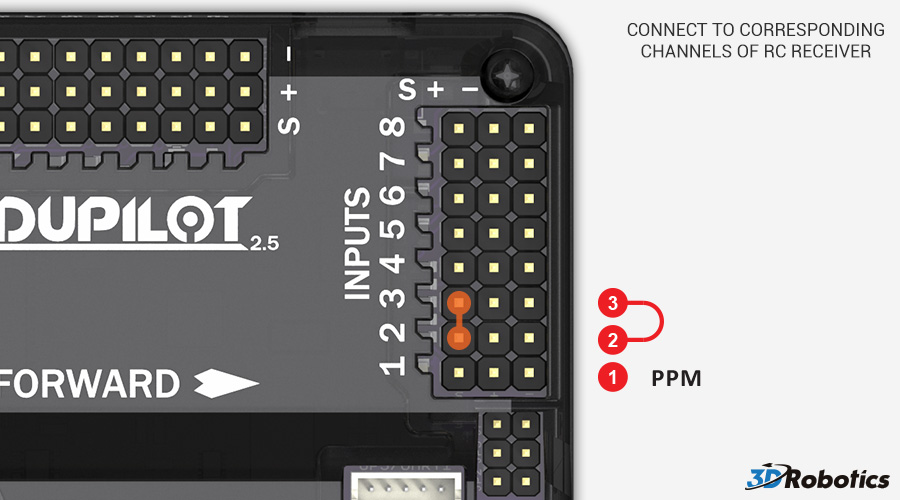
Если вы желаете использовать PPM сигнал , то вам необходимо перемычкой замкнуть 2 и 3 сигнальные каналы на APM и по первому каналу подать PPM сигнал из радиоприемника.
Подключение RC выходы к Motors
Если у вас имеется распределительная плата питания PDB , то можно подключить питание и сигнальные кабели через неё.
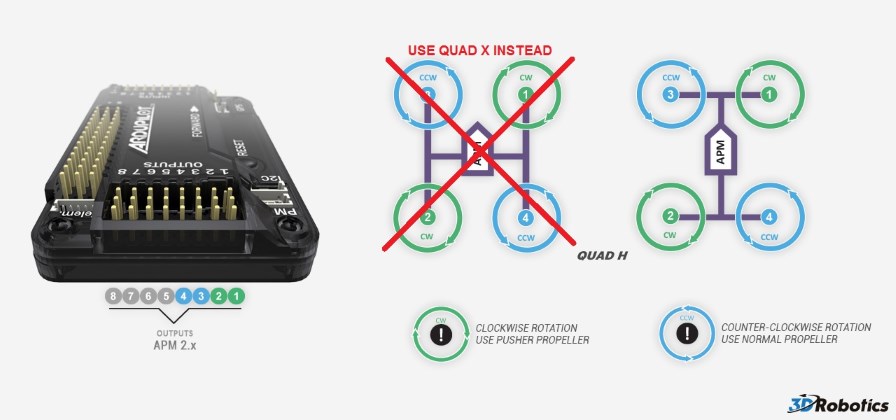
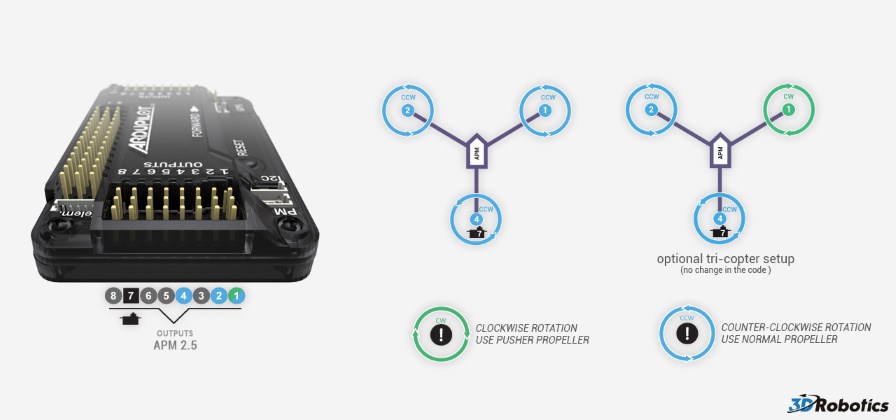
Последовательность подключения моторов к ArduPilot Mega
Конфигурация квадрокоптер X и Plus Конфигурация квадрокоптер H рама
Конфигурация квадрокоптер H рама
 Конфигурация трикоптер
Конфигурация трикоптер
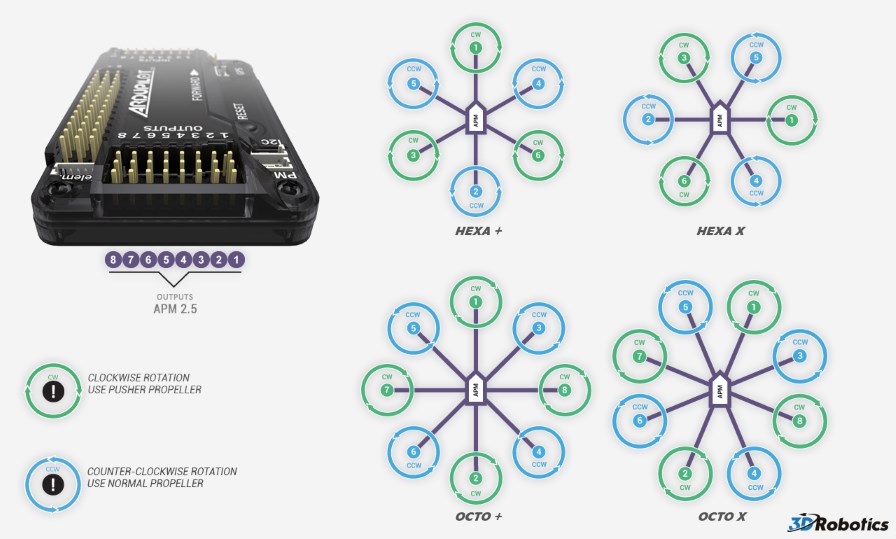
 Конфигурация гексакоптер и октакоптер
Конфигурация гексакоптер и октакоптер
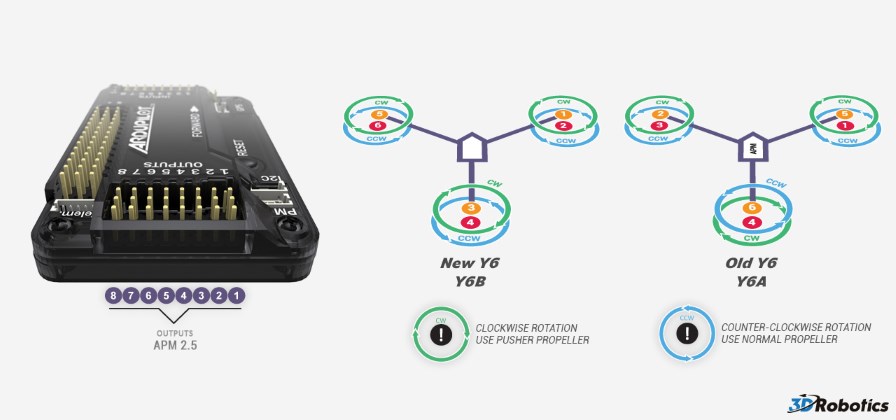
 Конфигурация трикоптер Y6
Конфигурация трикоптер Y6
 Конфигурация квадрокоптер X8
Конфигурация квадрокоптер X8

Определение стороны кручения пропеллеров
Совершенно очевидно , как показано ниже на картинке определить направление пропеллера для правильного соединения его к правильному двигателю. Задача состоит в том, что бы воздушный поток позволял квадрокоптеру отталкиваться от земли.
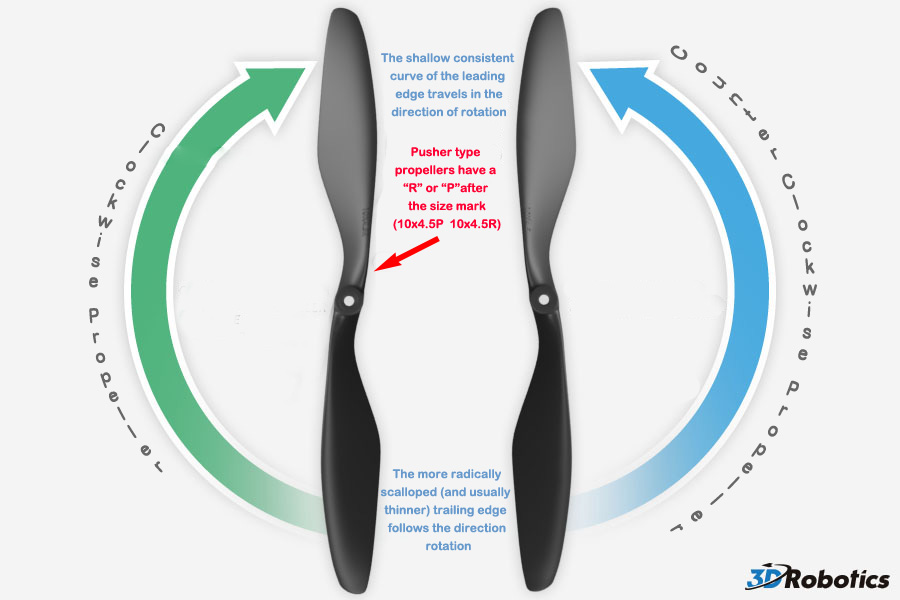
- Не все винты отмечены R или P, так что вам потребуется определить направление вращения, глядя на сам пропеллер.
- Есть два типа толкания воздушного потока - это пропеллеры типа CW (часового) и CCW (противочасового) вращения.
- Обратите внимание, пропеллеры выше имеют малую кривую на переднем крае по направлению вращения.
- Поэтому острее и как правило тоньше задняя кромка
- Это позволит вам определить правильное направление вращения пропеллеров
- Необходимо также, чтобы соответствующим образом использовать движение мотора и толкающую силу пропеллера там, где они необходимы.
- Большинство "обычных" квадрокоптеров используют сьёмник в виде винта.
- На гексакоптерах, октакоптерах требуются более толкательные винты и малооборотистые моторы.
- Есть так же конфигурации более толкающих пропеллеров для нормальных Tri, Quad, Hex и октакоптеров.
- Суть в том, что вы должны получить правильный тип и вращения винтов для вашего квадрокоптера и установить их должным образом.
- Используя хорошие качественные винты и их хорошую балансировку позволит повысить производительность, время полётов и снижения вибрации.
Простой способ проверки направления вращения двигателей
Если вы завершили калибровку Радиоаппаратуры и регуляторов ESC , то вы можете проверить, что ваши моторы вращаются в правильном направлении: Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
- удерживая свой квадрокоптер на достаточно хорошем растоянии для безопасности, снимите его с охраны (arming) удерживая ручку газа до упора вправо в течение четырех секунд.
- Теперь аккуратно подайте газу, только немного, пока пропеллеры не начнут поворачиваться. Обратите внимание на направление каждого.
- Они должны соответствовать вращениям указаным на изображении рамы, которую вы выбрали
- Если двигатель вращается в неправильном направление - просто поменяйте два из трех проводов от регулятора ESC
Проверка направления вращения двигателя с помощью интерфейса командной строки
Альтернативный способ проверить, что двигатели были правильно подключили заключается в использовании команды "Motors" в CLI Mission Planner. Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
- Подключите APM к компьютеру с помощью мини-кабеля USB
- Подключите питание батареи
- Запустите Mission Planner и выберите Terminal, далее кнопку "Подключение к АРМ"
- В открывшемся окне терминала введите Test
- и введите тип теста motors
Теперь Двигатели будут вращаться в последовательности, каждый двигатель будет вращаться в течение 1 секунды при очень низкой скорости, а затем остановится. Вращение следующего двигателя начнется после 2 или 3 секундной задержки. Пожалуйста, соблюдайте направление вращения для каждого двигателя, а также, что двигатели вращаются один за другим.
Первый вращающийся двигатель будет тот , который расположен впереди в случае конфигурации +, или первым двигателем справа спереди в случае конфигурации X. Тест двигателей будет идти по часовой стрелке.
В случае конфигурации типа X8, квадрокоптер будет вращать сначало верхний передний правый двигател, затем нижний передний правый, и далее вокруг по часовой стрелке, по схеме.
После завершения теста вращения будет 4 или 5 секундная пауза до повтора.
Когда вы убедитесь , что тест проходит правильно:
- нажмите любую клавишу (этот процесс не остановится, пока не закончит текущую последовательность)
- отключите главный аккумулятор
- отсоедините USB-кабель
- Для любого двигателя вращается в неправильном направлении просто поменяйте любые два провода из регулятора ESC идущих на двигатель.
видео по настройке
