Обязательная настройка оборудования для APM
В рамках первоначальной установки вам нужно настроить необходимые аппаратные компоненты с помощью ПО Mission Planner. Эти инструкции описывают процесс выбора ориентации рамы и настройке радиопередатчиков, компаса и акселерометра.
Выберите тип рамы
На экране ПО Mission Planner выберите Initial Setup -> Frame . Выберите тип рамы для мультикоптера. В конфигурации по умолчанию является рама типа X. Если вы хотите одним лучем указать "нос" в качестве фронтального направления, выберите конфигурацию Plus. Для Трикоптеров, традиционных вертолетов и тип рамы Y6, рама игнорируется.
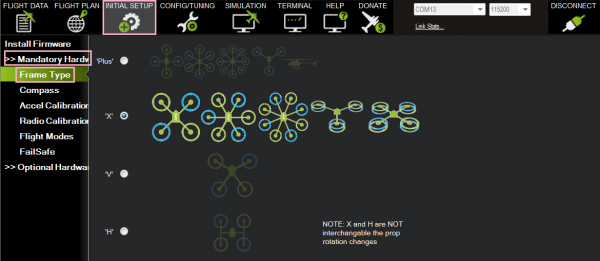
( Для Н-рамы квадрокоптера используйте дополнительный вариант '3' на вкладке Дополнительные параметры. Чтобы применить конфигурацию H-рамы, поменяйте левый задний и правый задний пропеллеры обратного направления с двигателей (путем замены любых двух проводов электродвигателя). Повторите тот же процесс для передних двух двигателей.)
Калибровка компаса
Для выполнения базовой калибровки компаса необходимо:
- В Mission Planer в меню Intial Setup выберите Compass . Выберите правильную ориентацию для вашей установки.
- Убедитесь, что компас включен и установлены галочки у Enable и AutoDec
- Нажмите кнопку "Live Calibration"

- Вплывающее окно сообщит вам, что у вас есть 60 секунд на то, чтобы вращать APM вокруг по всем осям, нажмите "ОК"
- Появиться окно, которое покажет, что выполняется сбор данных с компаса
- В течение следующих 60 секунд вам нужно удерживать квадрокоптер в воздухе, и поворачивайте его медленно, так что бы каждая сторона (спереди, сзади, слева, справа, сверху и снизу) указывала вниз к земле в течение нескольких секунд.

- По завершении появится еще одно окно , которое покажет новые расчитанные смещения измерений компаса.
- Для АРМ все три значения от -150 до 150 смещения являются хорошими. Нажмите "OK".
Проверьте это видео для примера выполнения калибровки компаса.
Подробнее об этом и других процедурах настройки компаса "compassmot" можно найти .
Общее обсуждение магнитных помех и способы их снижений можно найти .
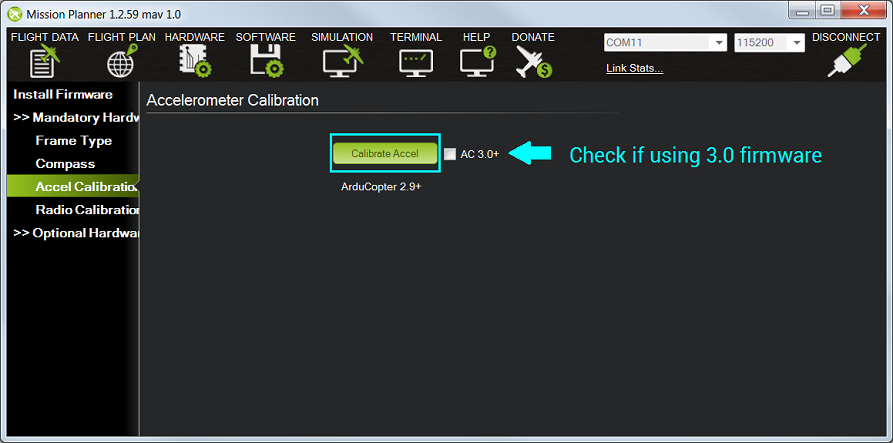
Калибровка акселерометра
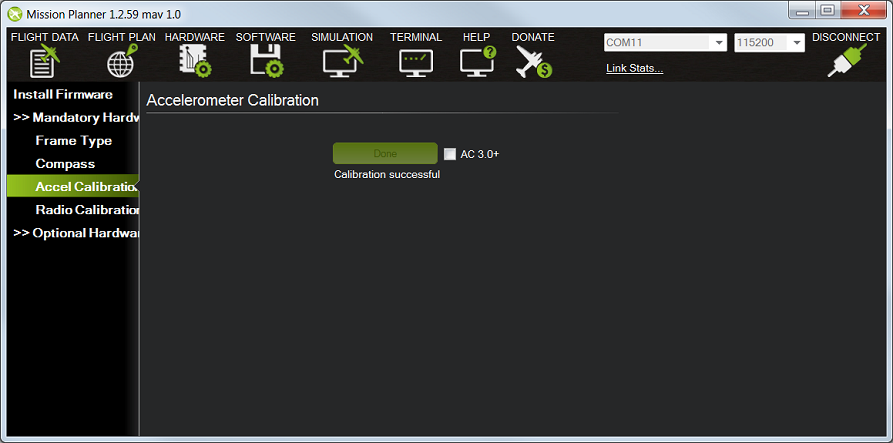
В Mission Planner выберите раздел Init Setup, выберите Accel Calibration в меню слева.
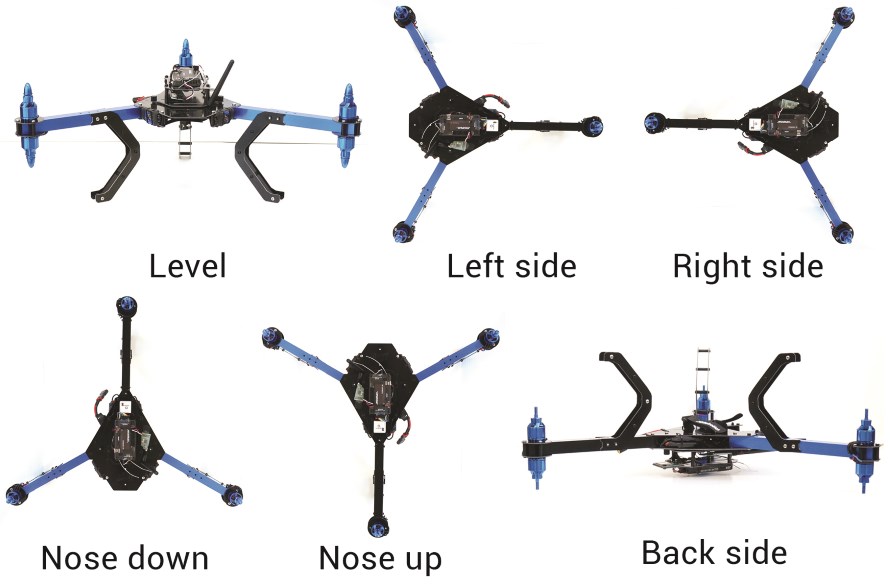
Если вы используете прошивку ArduCopter 3.0, убедитесь, что установленна галочка 3.0 +. Если вы используете 2.9.1b (или старее прошивки), снимите галочку. Этот процесс потребует от вас разместить беспилотник в последовательных положениях, которые попросит вас программа. Эти положения уровня являются важными, так как ваш полетный контроллер определяет уровень во время полета.
Видео демонстрации калибровкиВажно не перемещайте беспилотник сразу после нажатия клавиши каждого шага. Проверьте это видео для примера, как держать квадрокоптер.
Когда вы будете готовы для выполнения калибровки, выберите Accel Calibration .
Mission Planner будет подсказывать как надо разместить беспилотник в каждой позиции калибровки, нажмите любую клавишу. Пройдите требуемые шаги.
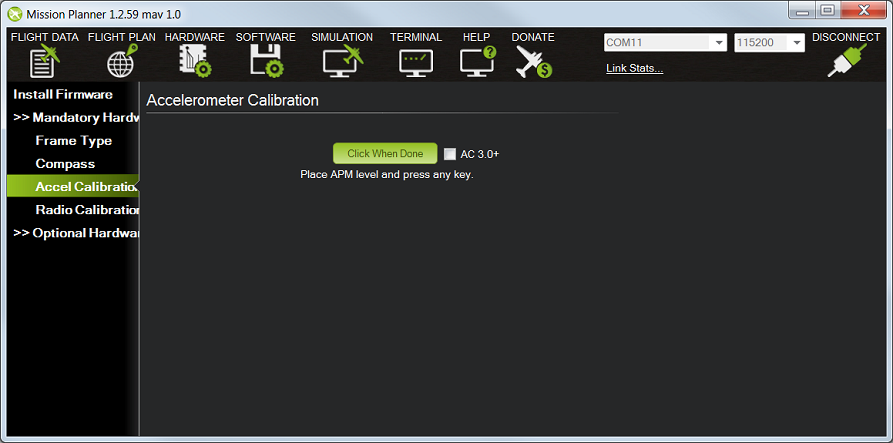
Когда вы завершили процесс калибровки, Mission Planner будет отображать окно успешной калибровки, как показано ниже.
Калибровка радиоуправления
Включите радиоаппаратуру, убедитесь, что передатчик находится в режиме самолета (APM необходим режим полета, независимо от типа платформы на экспериментальной основе), установите все стики по центру.
Рекомендуемая настройка RC каналов на передатчике.
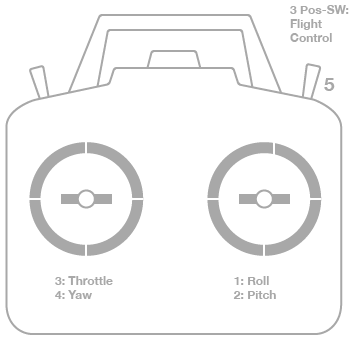
Для аппаратуры Mode 1 , левый джостик (стик) будет контролировать высоту (Pitch) и рыскания (Yaw), правый - будет контролировать дроссель (газ, throtle) и крен (Roll).
Для аппаратуры Mode 2 , левый джойстик (стик) будет управлять дроссельной заслонкой (throtle) и рыскания (Yaw); правый - будет контролировать крена (Roll) и тангажа.
Для любого типа передатчика, трехпозиционный переключатель должен быть подключен к 5-му каналу и будет контролировать режимы полета.
По желанию ручки настройки передатчика должны контролировать канал 6 для настройки полетета. 7 и 8 канал могут быть использованны для вспомогательных функций. В Planner Mission, нажмите кнопку "Калибровка Радио" в нижней правой части окна. Mission Planner вызовет диалоговое окно с предупреждением что пропеллеры должны быть сняты!. Выберите OK.
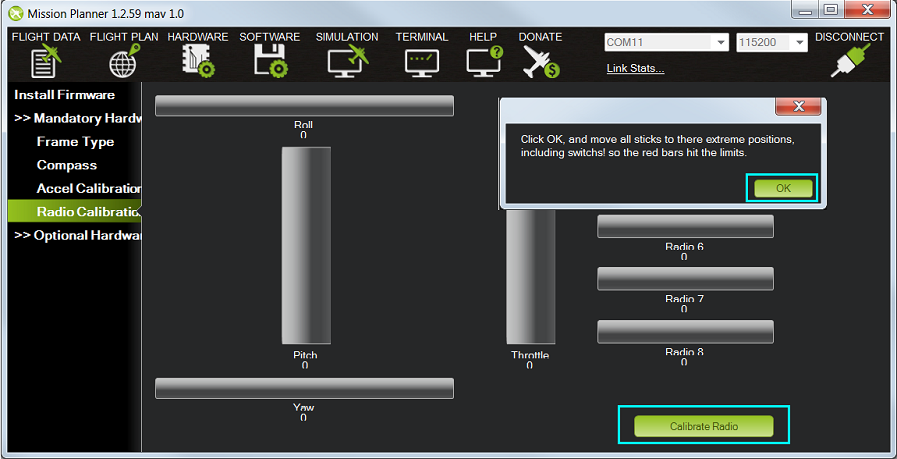
Нажмите OK и начните двигать ручки управления и тумблерами на аппаратуре до их предела и наблюдайте за результатом калибровочных границ радио. Появившиеся красные линии калибровочных баров укажут максимальное и минимальное значения.
Ваше передатчик должен привести следующие изменения управления:
радиоканал 1: низкий = ролл слева, высокий = ролл прямо
радиоканал 2: низкий = шаг вперед, высокая = шаг назад.
радиоканал 3: низкий = дроссельная заслонка вниз (в выключенном состоянии), высокий = дроссельной заслонки до максимума.
радиоканал 4: низкий = рыскания влево, высокий = рыскания вправо.
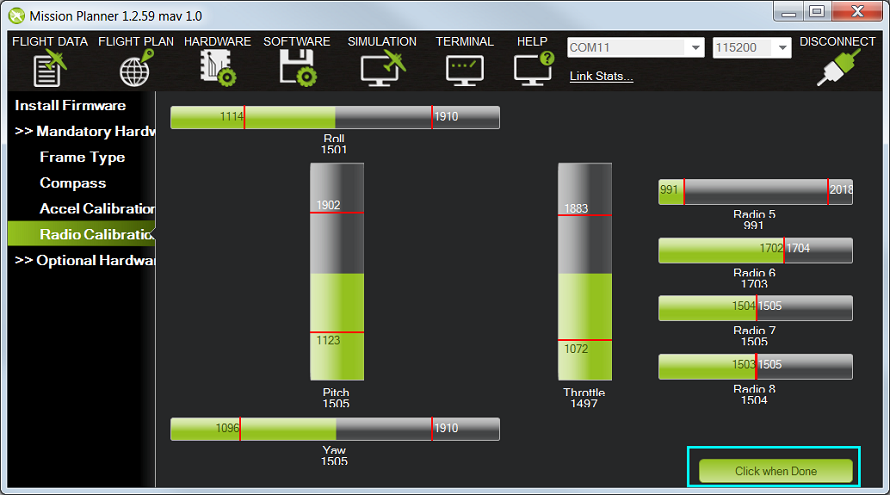
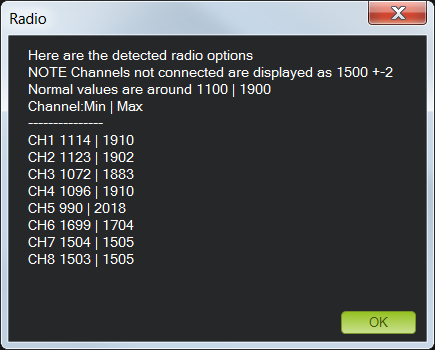
Когда красные линии для крена, тангажа, дросселя, рыскания и радиоканала 5 (необязательно у радиоканалов 6, 7 и 8) устанавлены на минимальных и максимальных значениях, выберите нажмите "Done". Mission Planner покажет сводку данных калибровки. Нормальные значения около 1100 для минимумов и 1900 для максимумов. Если значения показания бара идут в противоположном направлении от направления движения стика или тумблера это означает, что канал находится в инверсии на стороне передатчика. Используя меню аппаратуры настройте требуемый канал (установите или снимите инверсию) что бы установить правильное функционирование.
Настройка дополнительного оборудования (опция)
Дополнительные аппаратные конфигурации для монитора батареи, гидролокатора (Sonar sensor), датчик воздушной скорости (AirSpeed sensor), оптического потока (Optical Flow), OSD, камеры и следящей антенны подробно описано на вики странице: дополнительное борудование
