Инструкция по сборке квадрокоптера
Первым шагом в настройке квадрокоптера это сборка рамы и её компонентов. Эти инструкции дают указания по сборке и подключения квадрокоптера с APM автопилотом, включая передовую практику. Следующие подстраницы представляют более подробные инструкции по темам:
- Подключение радиопередатчика и моторов к вашему APM
- Виброгасящие демпфера
- Подключение и монтаж модуля GPS
- Подключение и монтаж комбинированного модуля GPS + компас
- Установка внешнего модуля компаса
- PX4 Инструкции по электропитанию
Соберите раму
Комплекты рам доступны в магазине. Выберите модель ниже, чтобы посмотреть инструкции по сборке. Помните не устанавливайте пропеллеры сразу; мы установим их после калибровки ESC (регуляторов мотора).
Проводка
Приведенная ниже схема показывает стандартный вариант подключения для АРМ квадрокоптер.
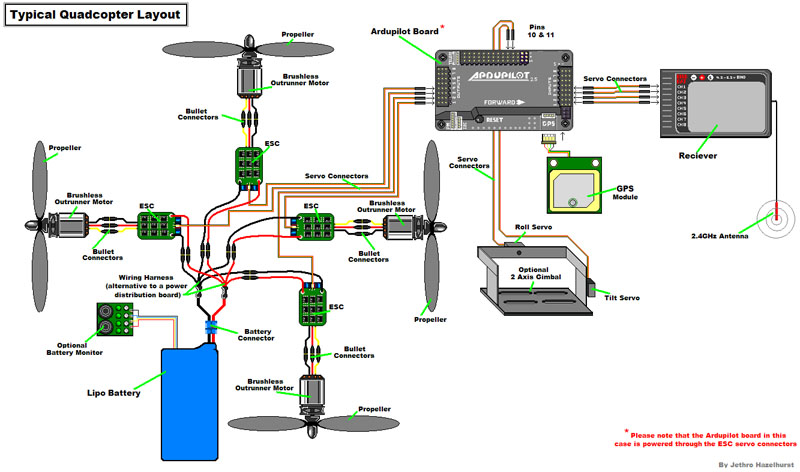
Для полного комплекта APM-Квадрокоптер необходимы следующие электронные компоненты:
- Автопилот с конфигурацией "квадрокоптер". В настоящее время поддерживает APM и PX4 автопилоты.
- Блок питания с LiPo батареи или эквивалентным методом питания (см. ниже)
- Распределитель питания (PDB) или эквивалент распределения мощности к двигателям
- Электронный регулятор скорости (ESC) для каждого двигателя
- Моторы
- RC приемник и передатчик
Включение квадрокоптера
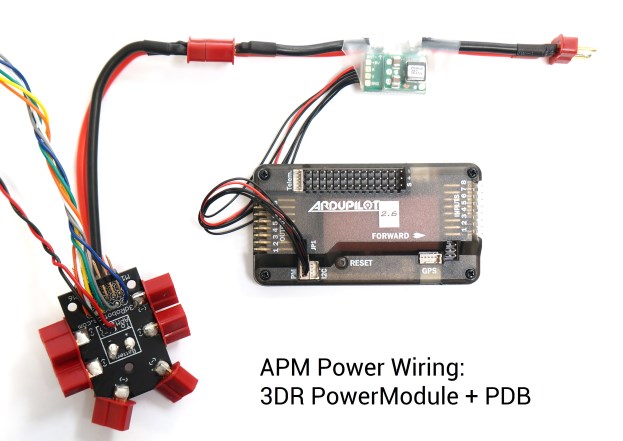
Самый простой способ включить квадрокоптер - использовать модуль питания с аккумулятором LiPo (см. Инф ). Для альтернативных методов питания вашего квадрокоптера, для плат APM 2.5 и 2.6 смотрите страницу (ссылка).
Для подключения модуля питания подключите силовые провода к распределительной плате PDB, а второй силовой провод к батарее или другому источнику питания. Подключите модуль питания к порту PM используя 6 проводной кабель.
Если Вы не используете модуль питания, то для подключения APM можно использовать внешний источник питания - UBEC. для этого подключите его к входам подключения моторов. Предупреждение: Так как регуляторы мотора в большинстве случаев уже имеют UBEC модуль, рекомендуется во избежание проблем не использовать их. Используйте внешний модуль питания в обход питания от регуляторов ESC.
Для этого на плате предусмотрен джампер JP1 расположены рядом с разхемами подключения моторов, используя внешний UBEC рекомендуется его удалить (снять перемычку), плату можно запитать через разъемы подключения приемника. Все это необходимо если вы не используете штатный модуль питания.
Подключите ESCs и двигатели
Подключите кабели двигателя с электронным регулятором скорости (ESC) штепсельных соединений. Каждый двигатель должен подключиться только к одному ESC.

Подключите разъемы питания регуляторов ESC в распределительную плату (PDB). Подключите трехжильный сигнальный провод от регулятора ESC к рапределительной плате питания PDB, согласно нумерования конфигурации моторов. т.е. первый мотор в разъем 1 , второй - в разъем 2 и так далее. Если вы не используете распределительную плату, допускается подключение непосредственно прямо к разъемам APM - Output Pins Предупреждение:В зависимости от схемы питания рекомендуется питать плату внешним UBEC, вместо встроенного в регулятор ESC. Удалите джампер JP1 если он присествует для питания внешним UBEC.

Лучшие практики
При сборке квадрокоптера, мы рекомендуем использовать резьбовые винты. Так же потребуется специальное средство для лучшего закрепления болтов, которое не даст им раскрутиться. При закреплении проводов питания держите положительный и отрицательной вместе к друг другу, можно использовать стяжки. Что бы обеспечить проводку по раме можно использовать кабельную сетку, где это возможно. Используйте гашение вибрации там, где это возможно, за дополнительной информацией посетите страницу по изоляции.
Инструкция для подключения радиоприемника и двигателей к АРМ можно найти на странице .
- Предупреждение! В любом режиме удержания высоты которые: : Alt-Hold, Loiter, AUTO, AutoLand или RTL если полет квадрокоптера становиться неустойчивой, при посадке или близком нахождением к земле - (а так же при автоматической посадки) вы вероятно не правильно установили полетный контроллер - это влияет на барометр (высотометр), который зависит от давления создаваемового самим квадрокоптером и его воздушным потоком.
- В этом можно убедиться посмотрев на журнал показания высотомера видя, что показания колеблятся, когда он у земли.
- Если это является проблеммой , переместите контроллер полета или оградите его от проветривания корпуса.
- Успешность летных испытаний может быть проверена по результатам журналов.
- Это предупреждение находится здесь, так что у вас есть возможность не допускать этого в первую очередь.
- Как правило, лучше установить контроллер на верхней части квадрокоптера.
- Если у вас имеется крышка которая закрывает полетный контроллер, убедитесь, что она не вентилируется от пропеллеров и в ней не создается давление.
